Here you can find information about the robots with which we have participated in Eurobot.
2015
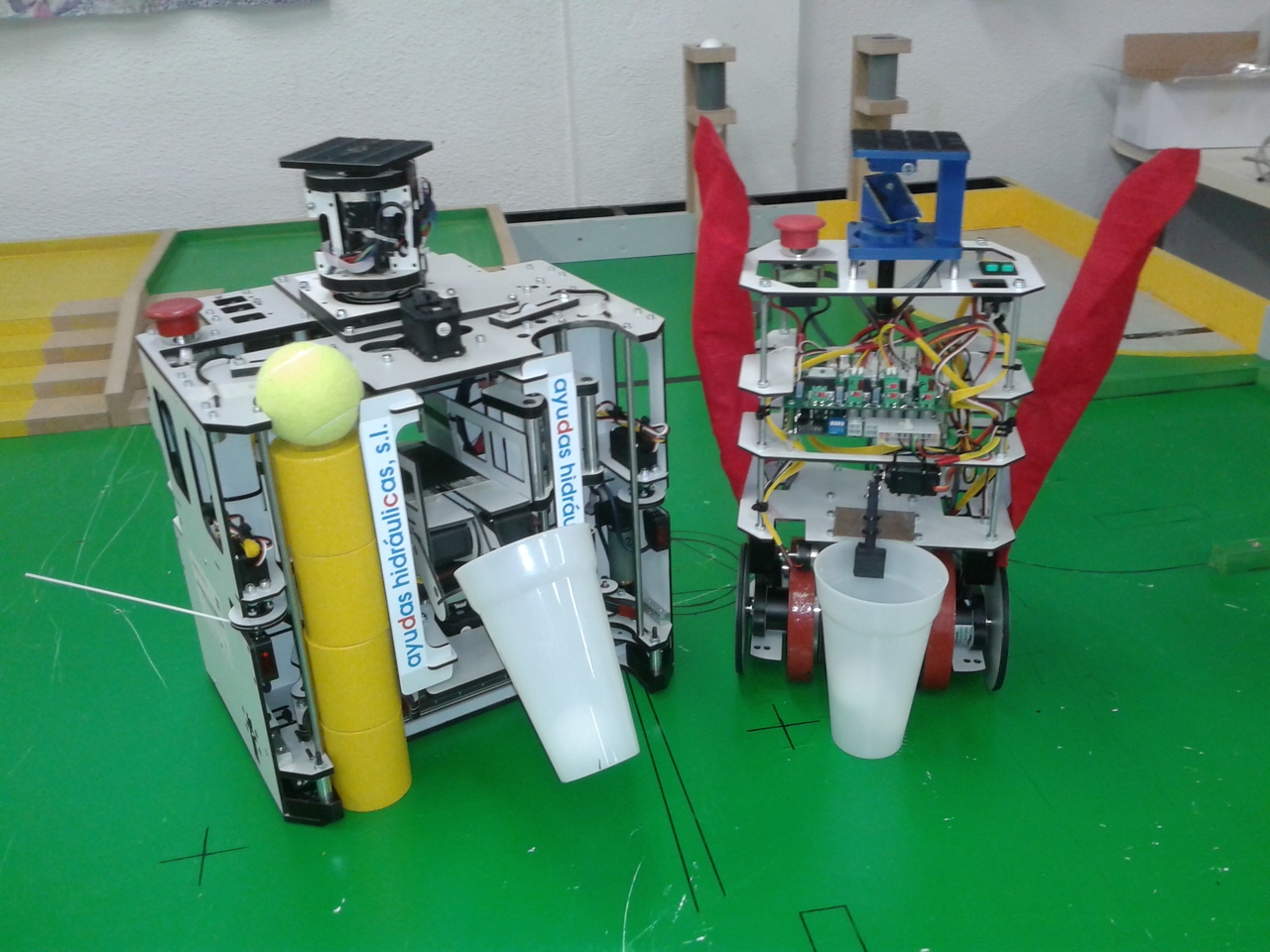
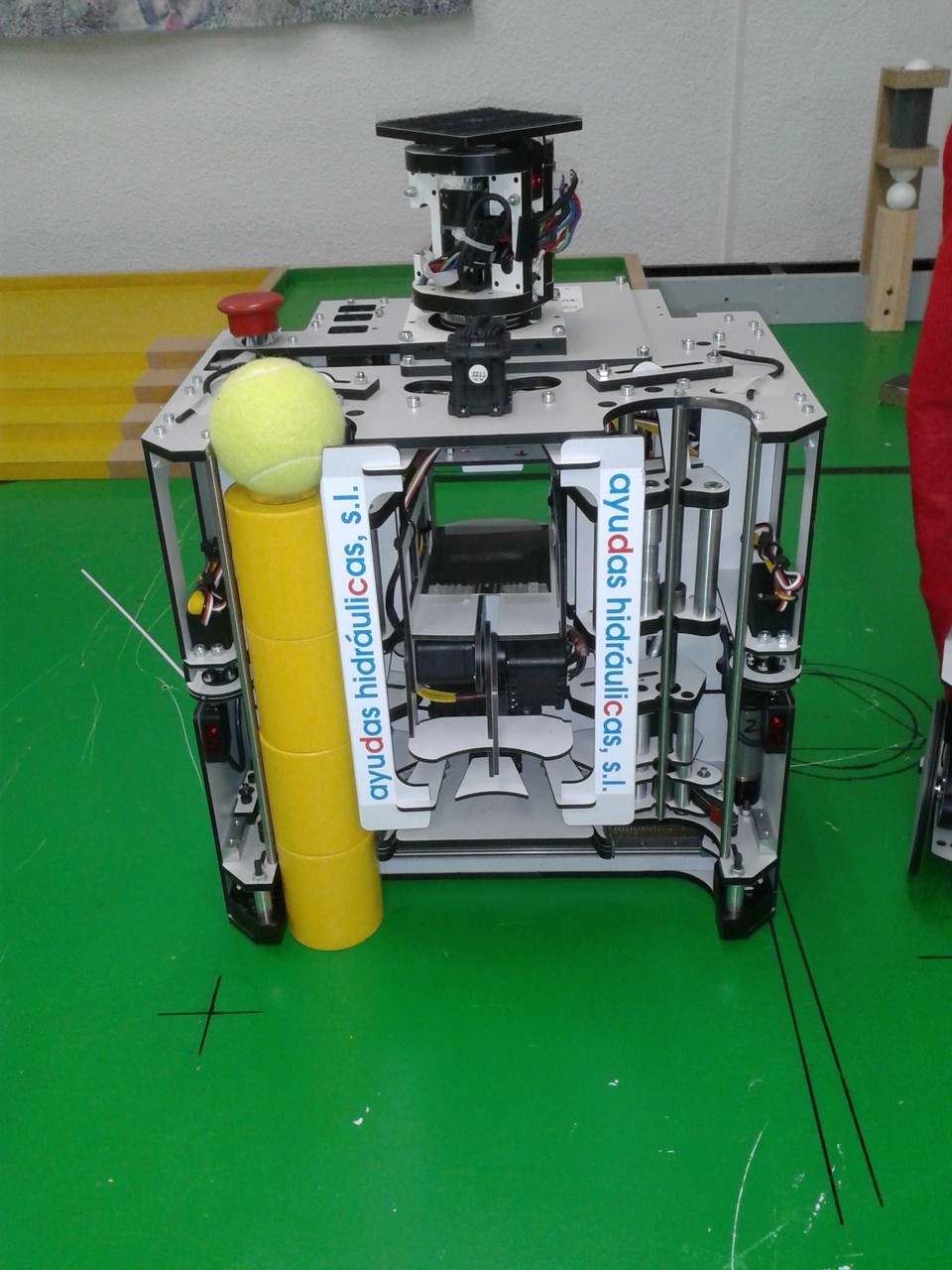
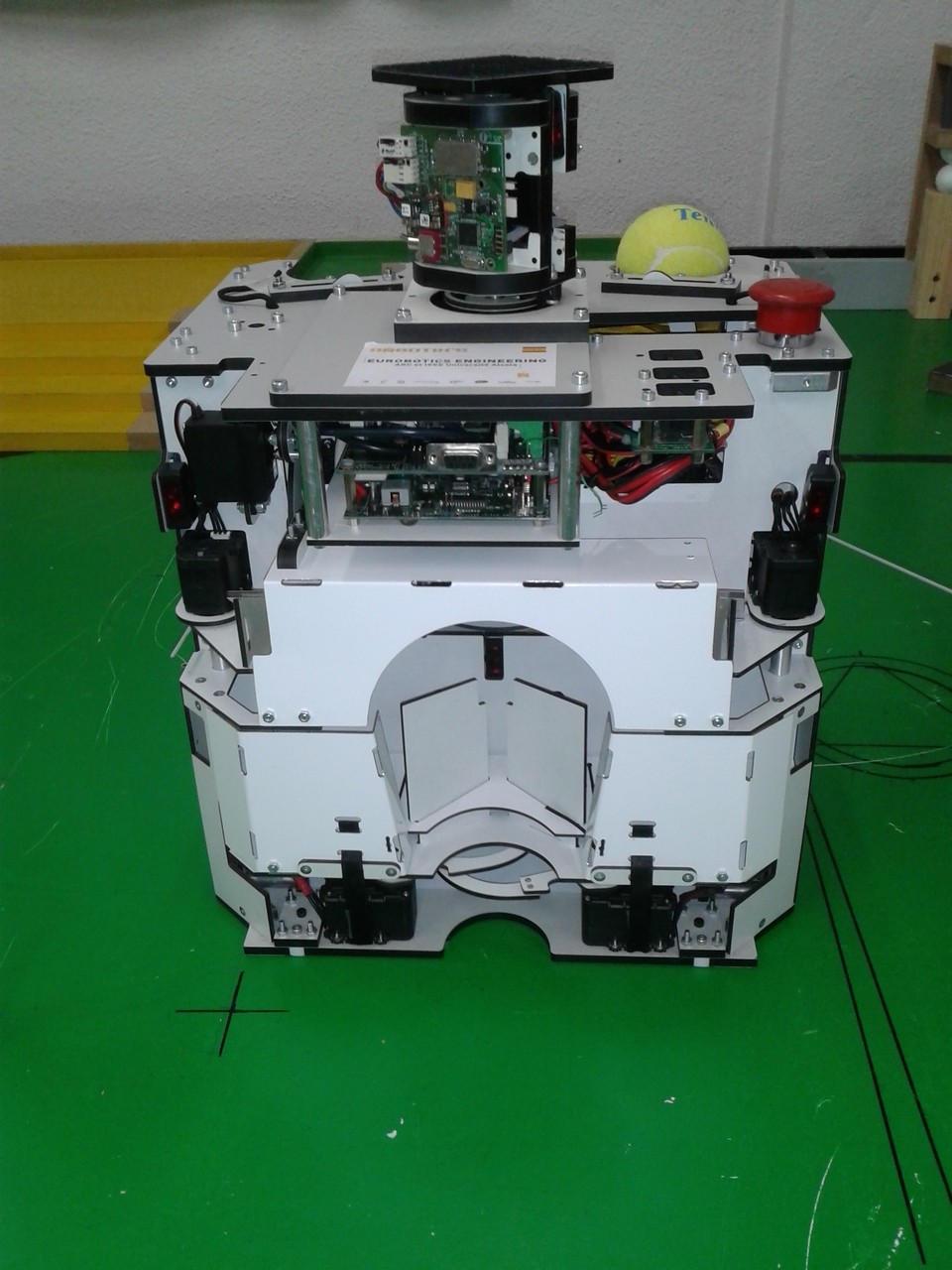
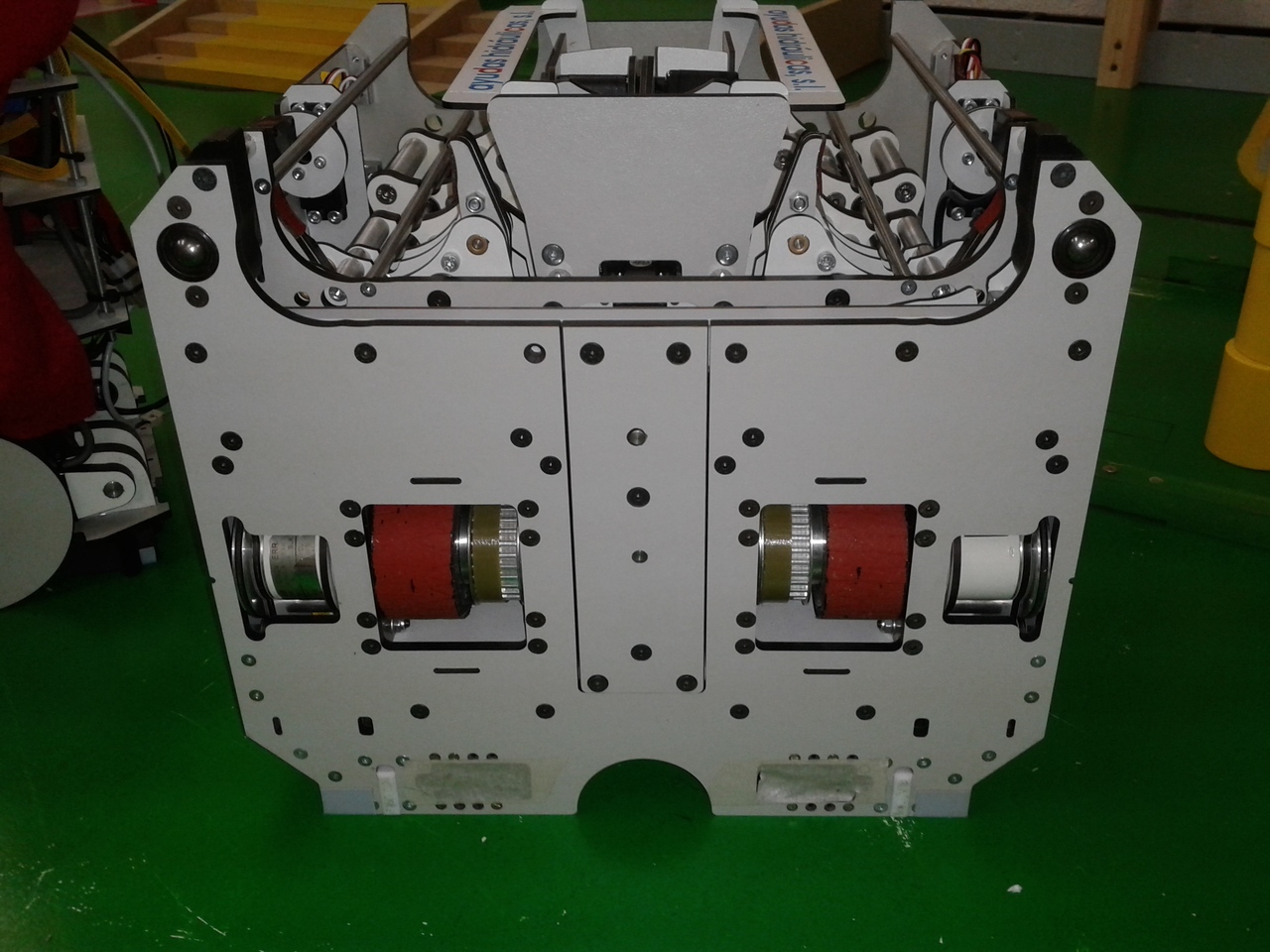
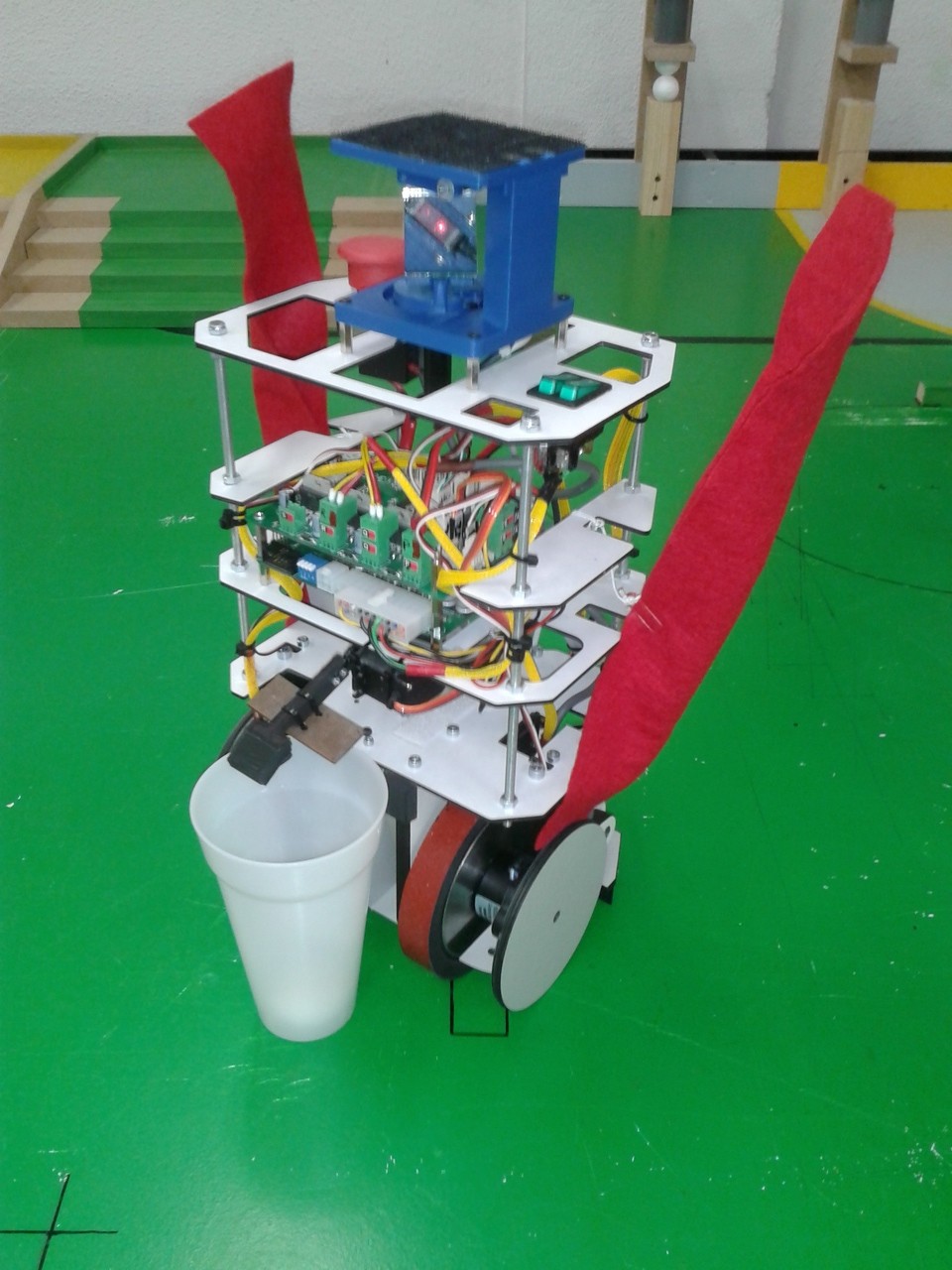
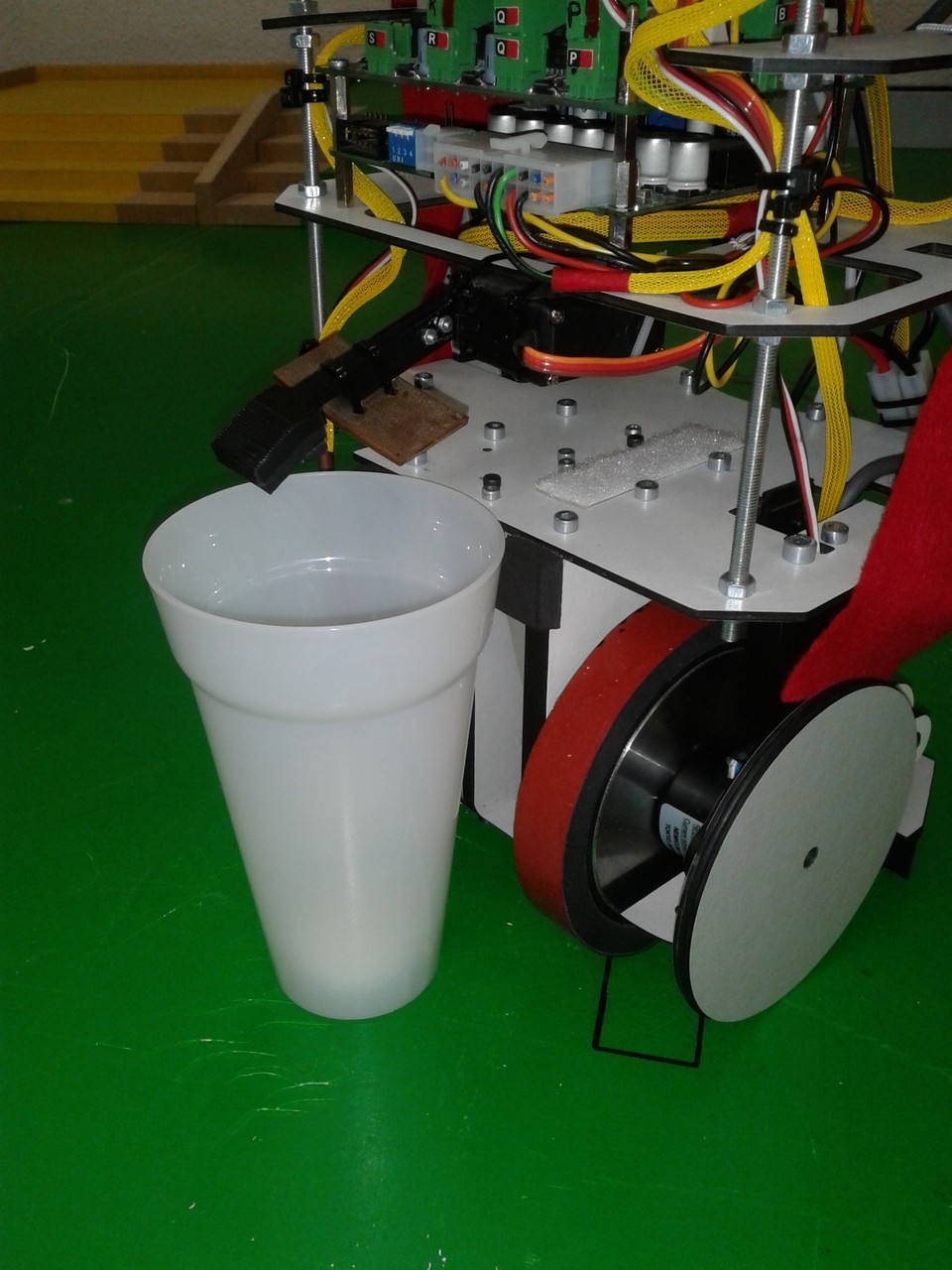
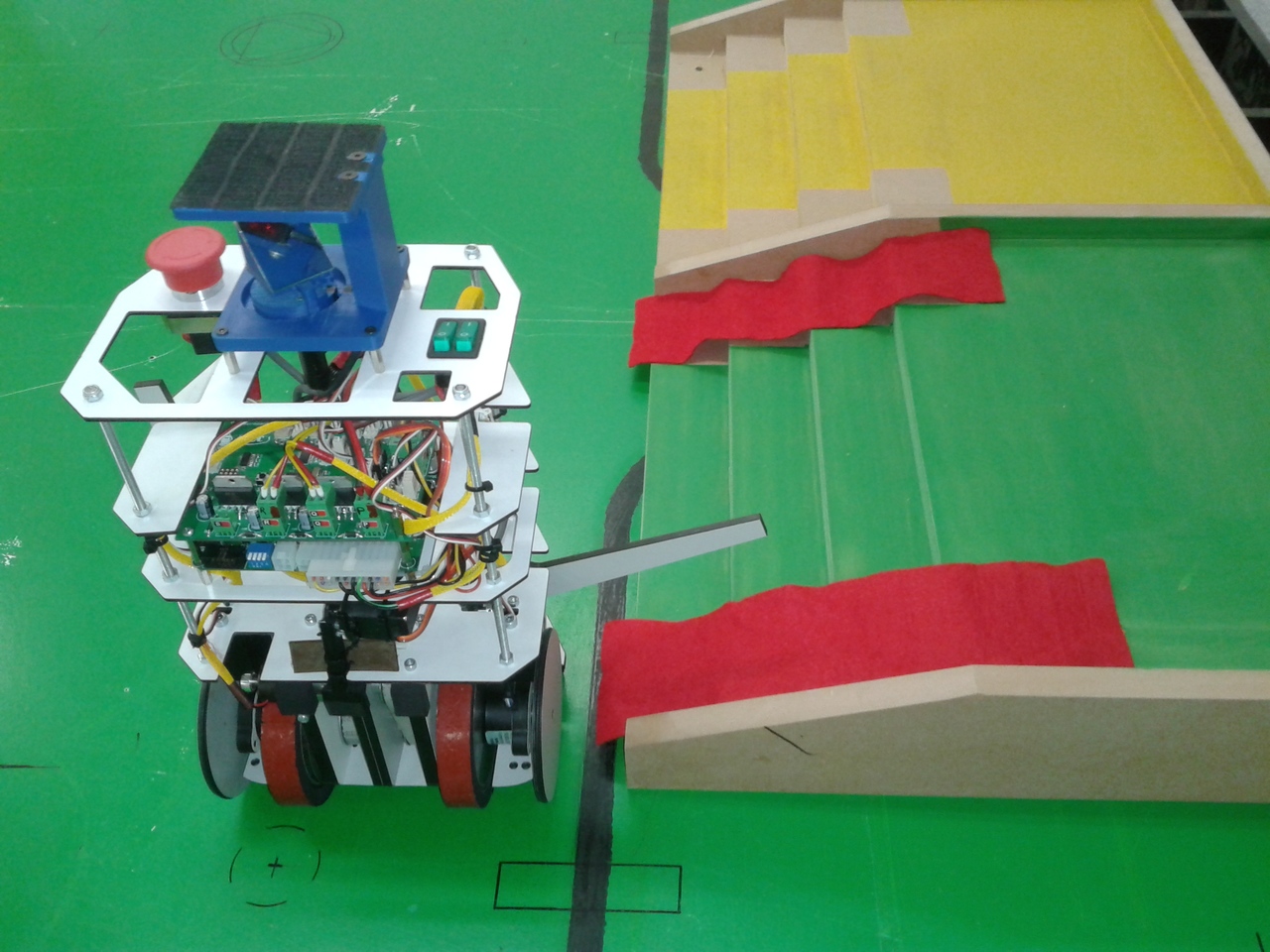
Eurobot 2015 – Robots P.Tinto and Tirantes
The year 2015 was the last one the team participated in Eurobot contest and also one of the best.
Since 2008 the names of all our robots have been extracted from a JAvier and Guillermo Fesser movie “El milagro de P.Tinto”. This year was a good opportunity to name our robots “P.Tinto” and “tirantes” (suspenders), key point in the movie.
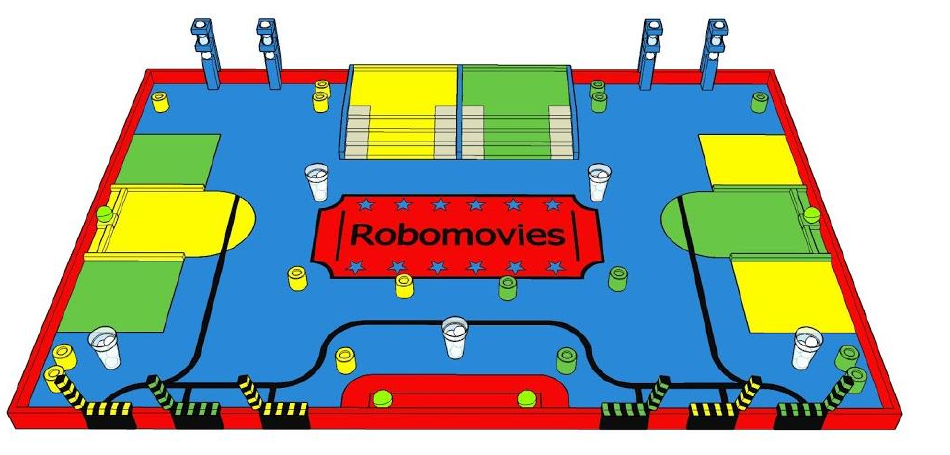
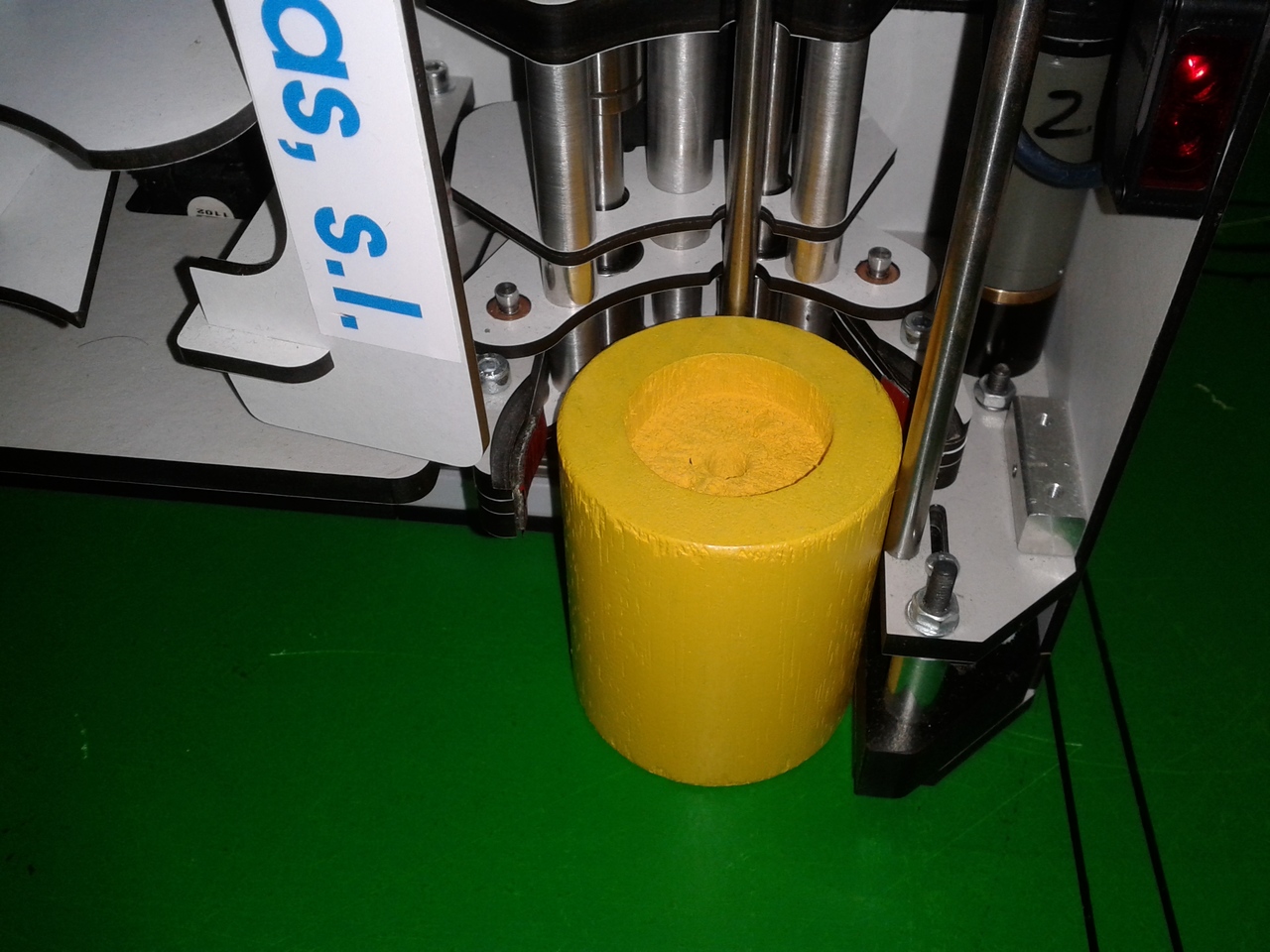
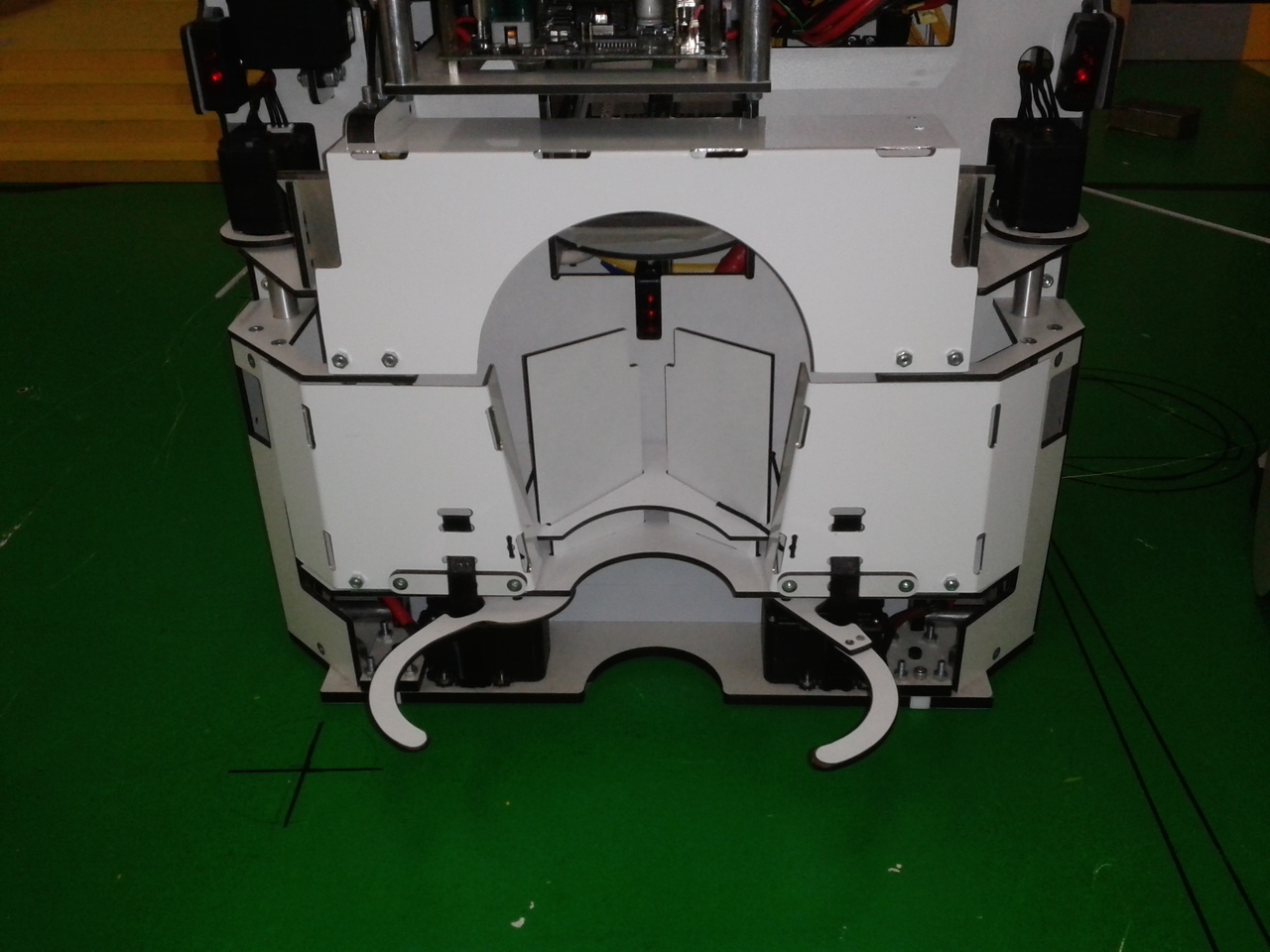
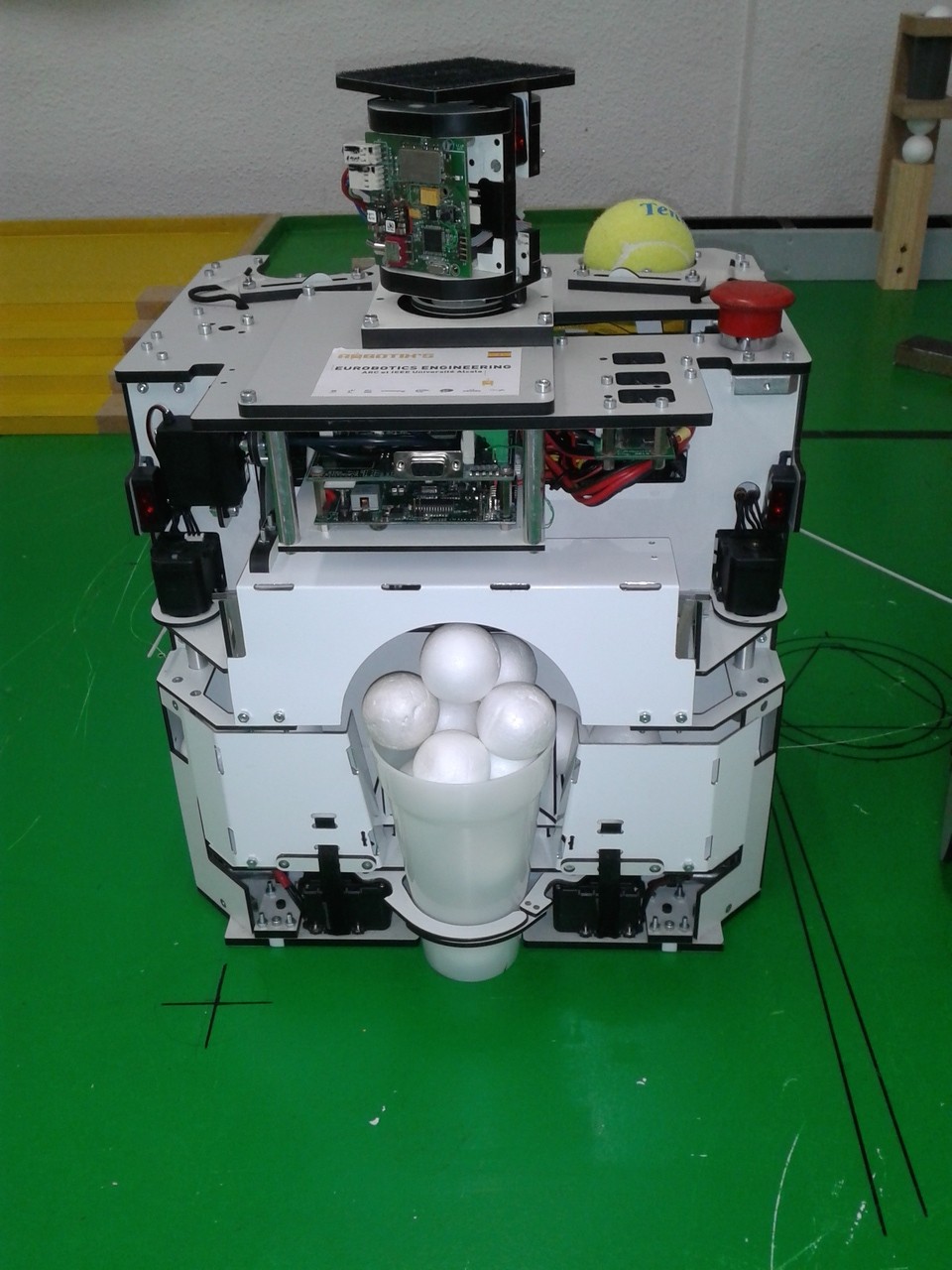
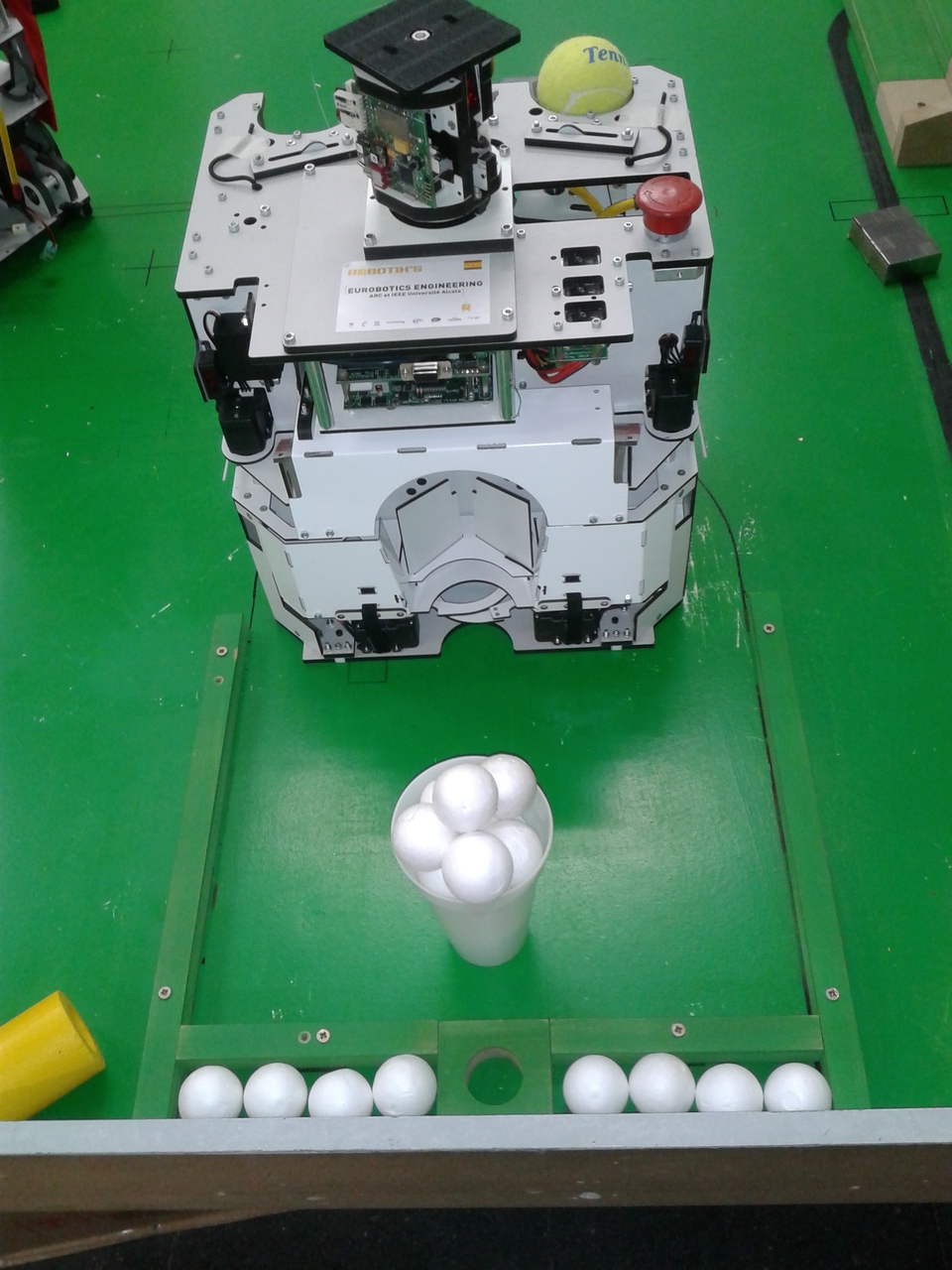
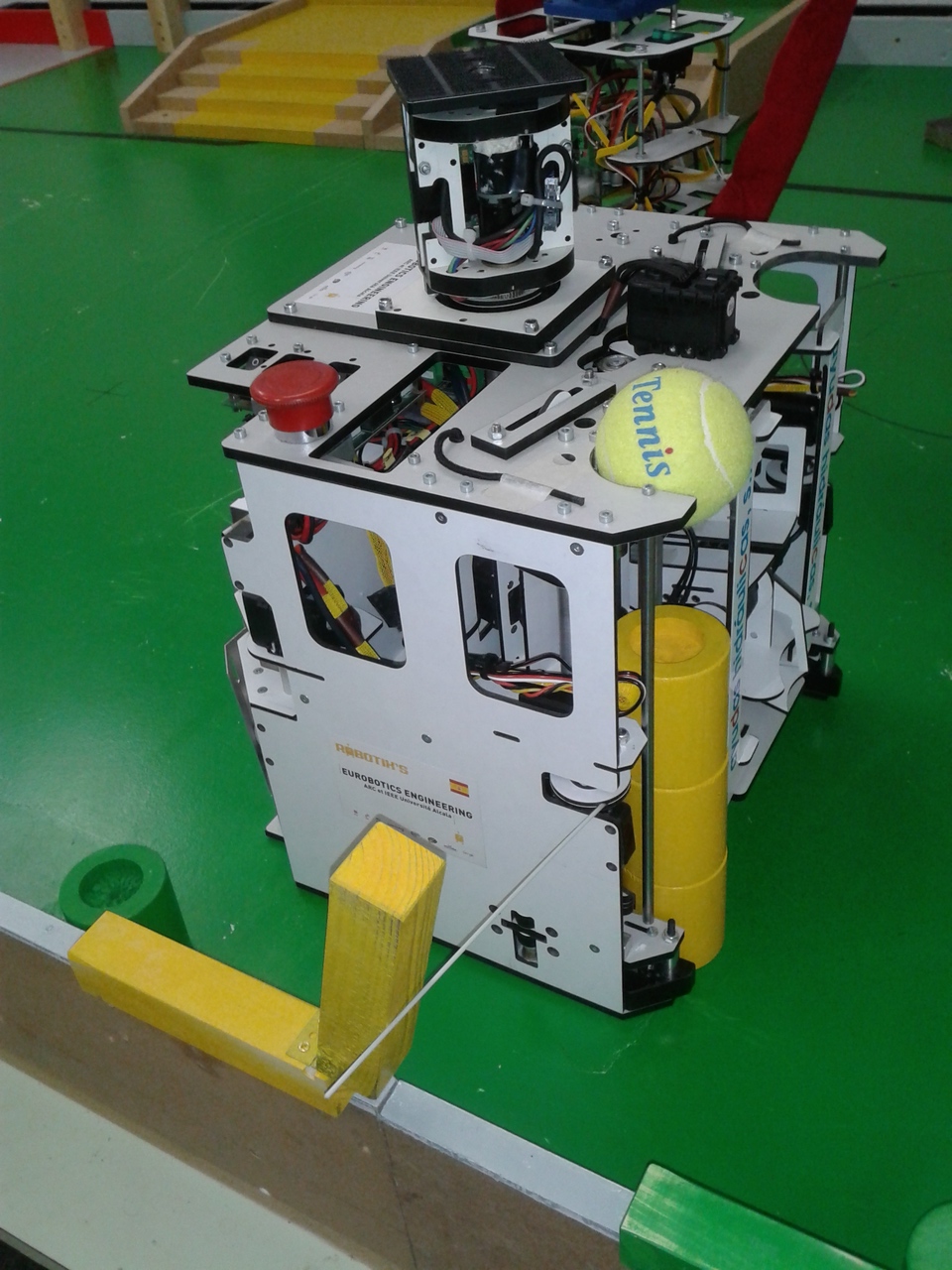
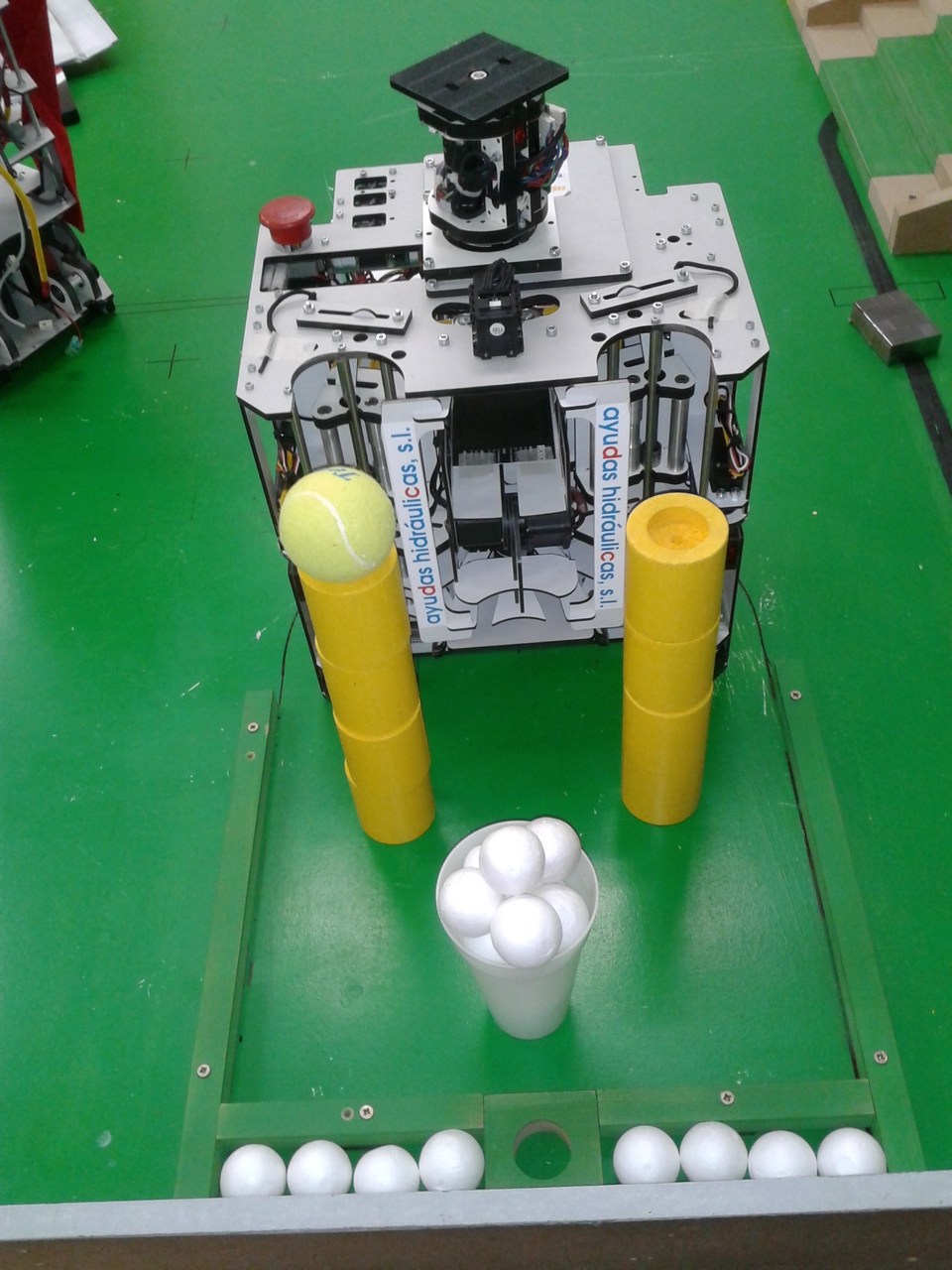
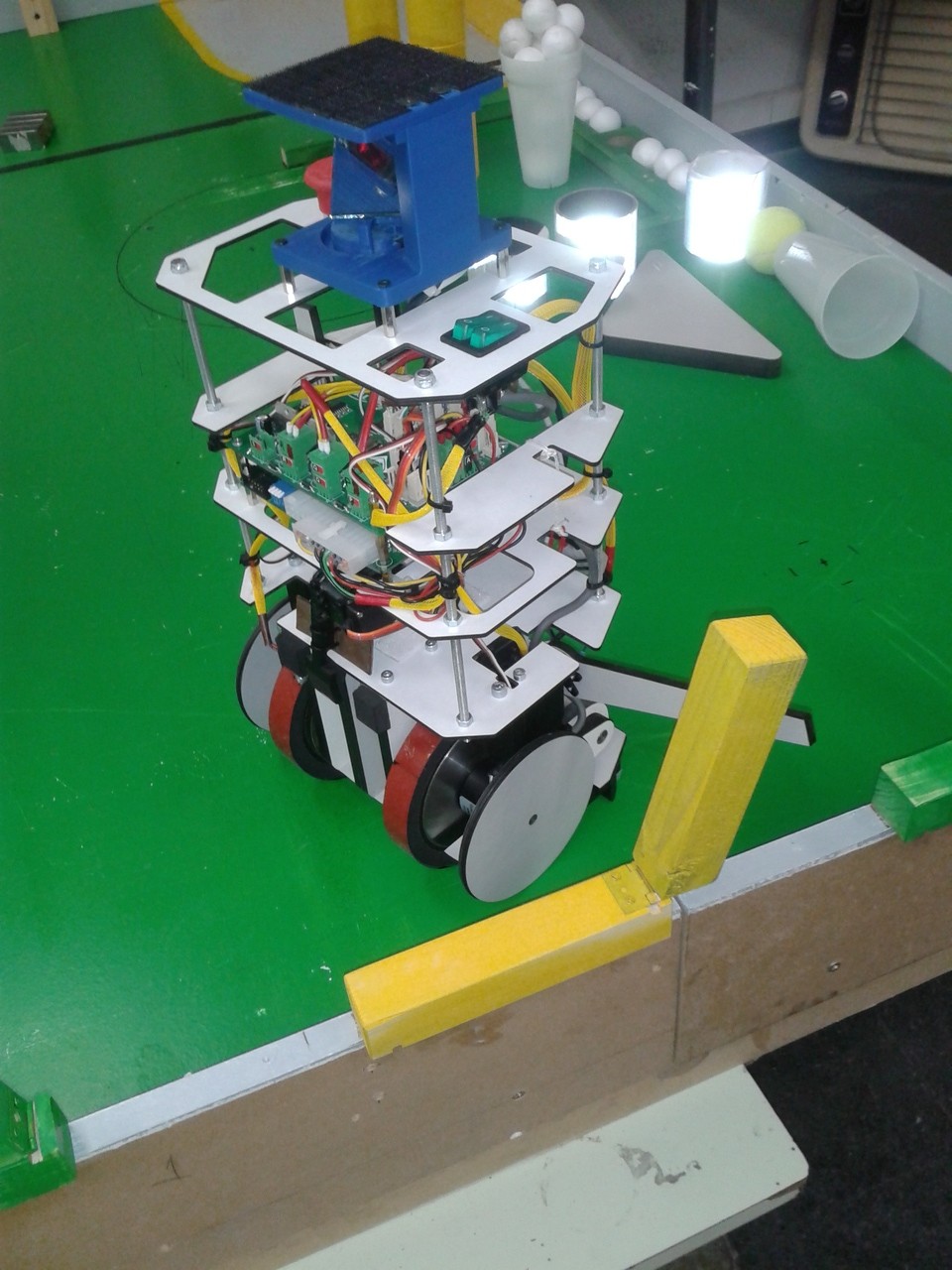
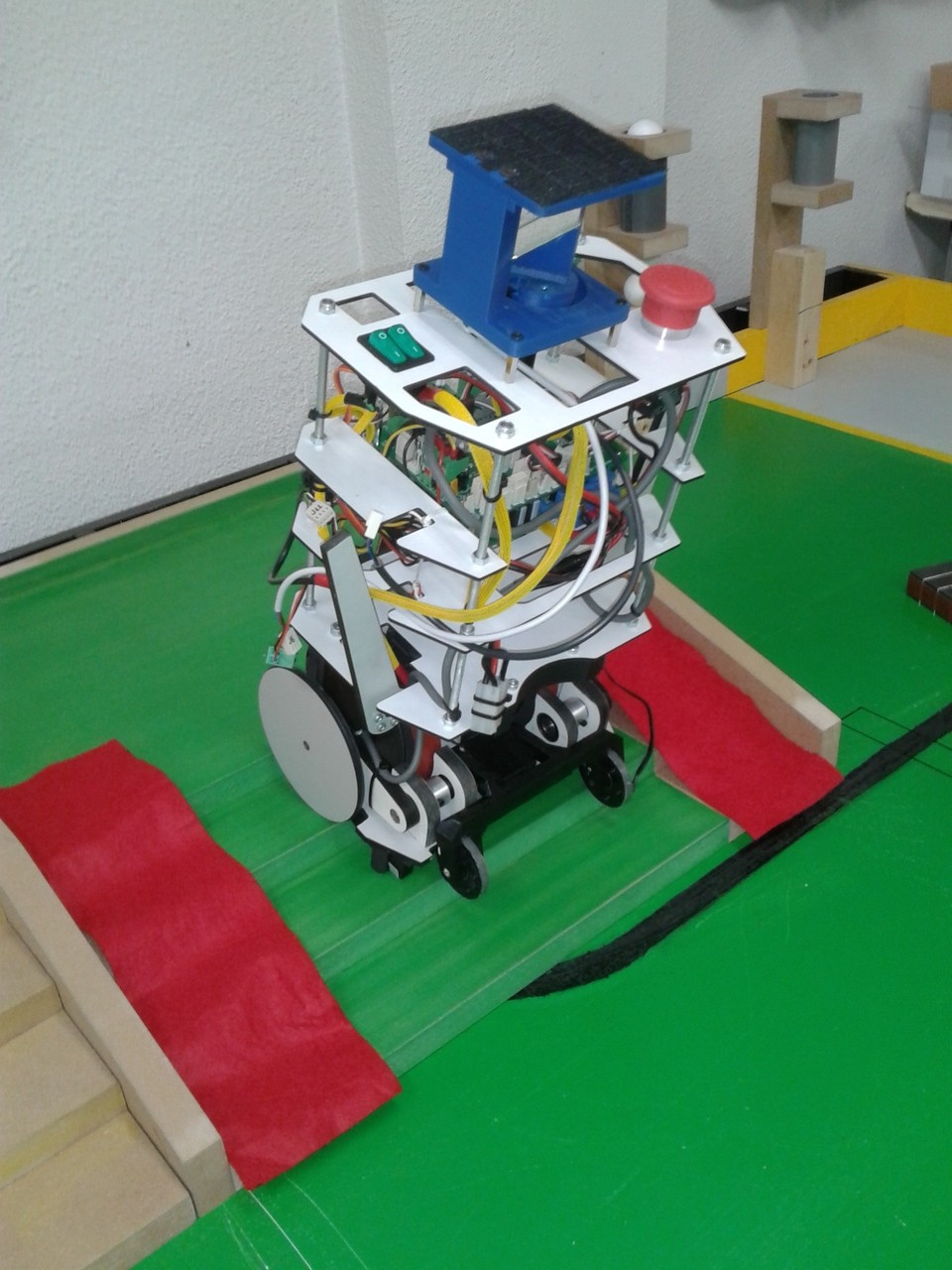
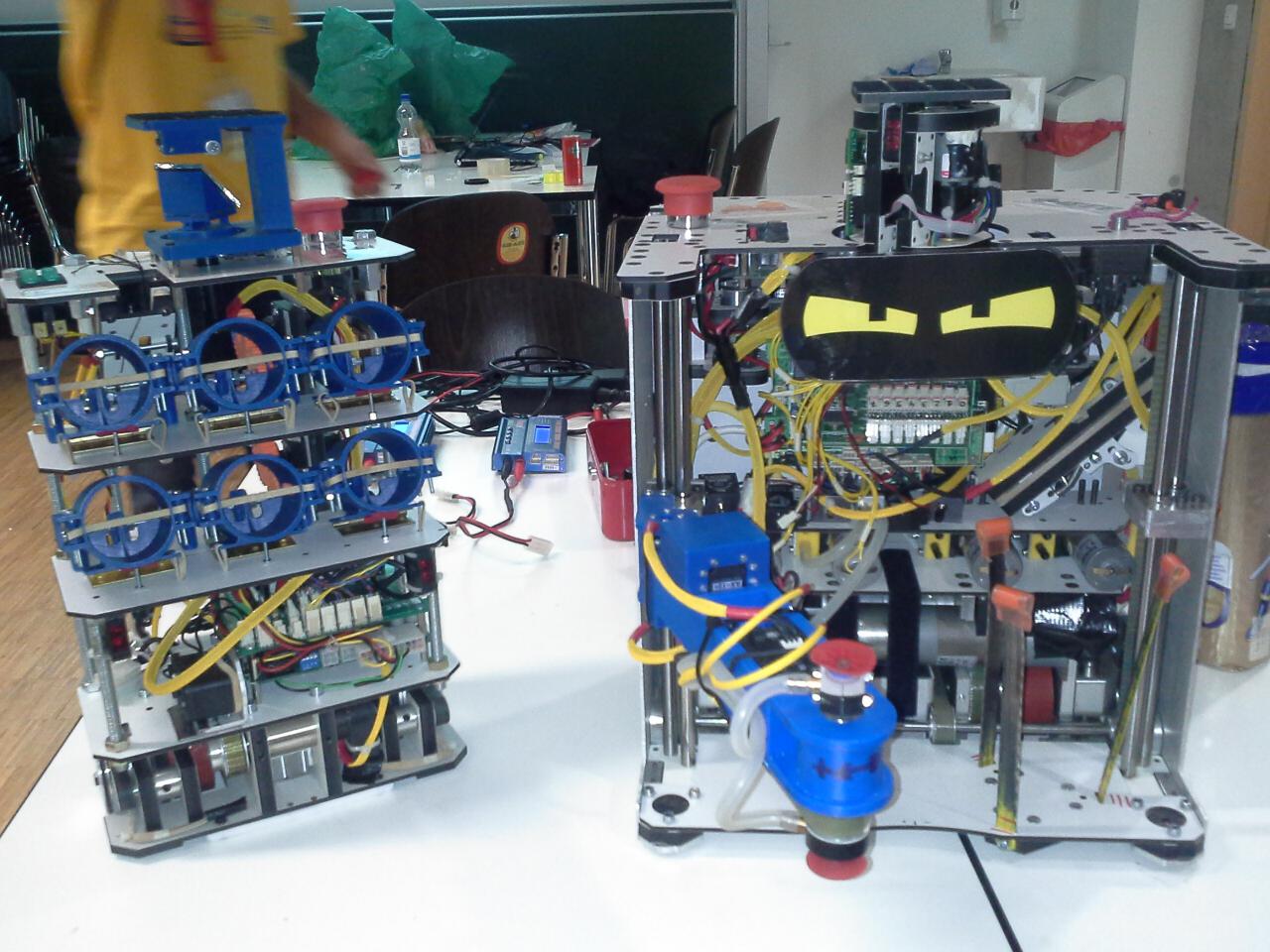
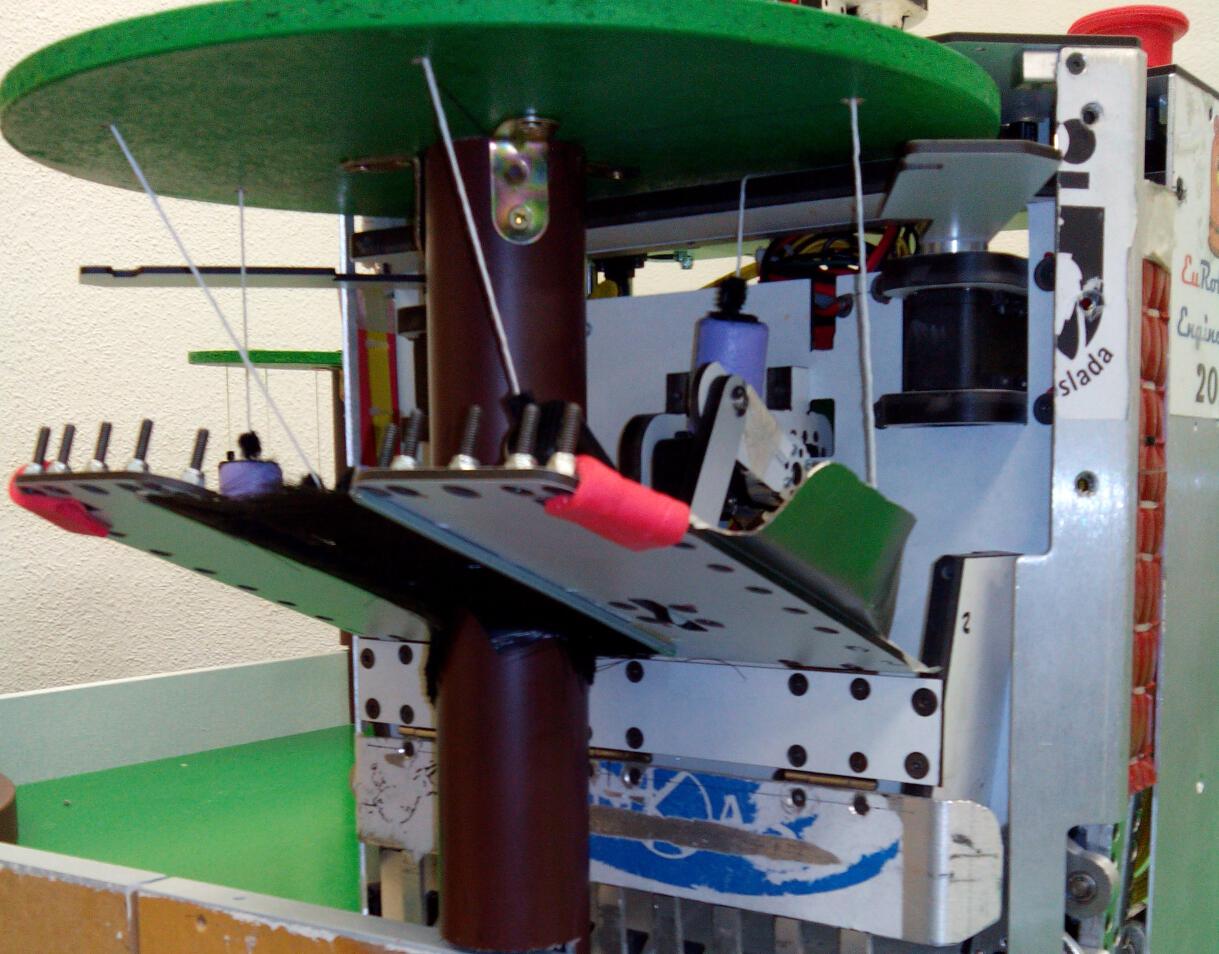
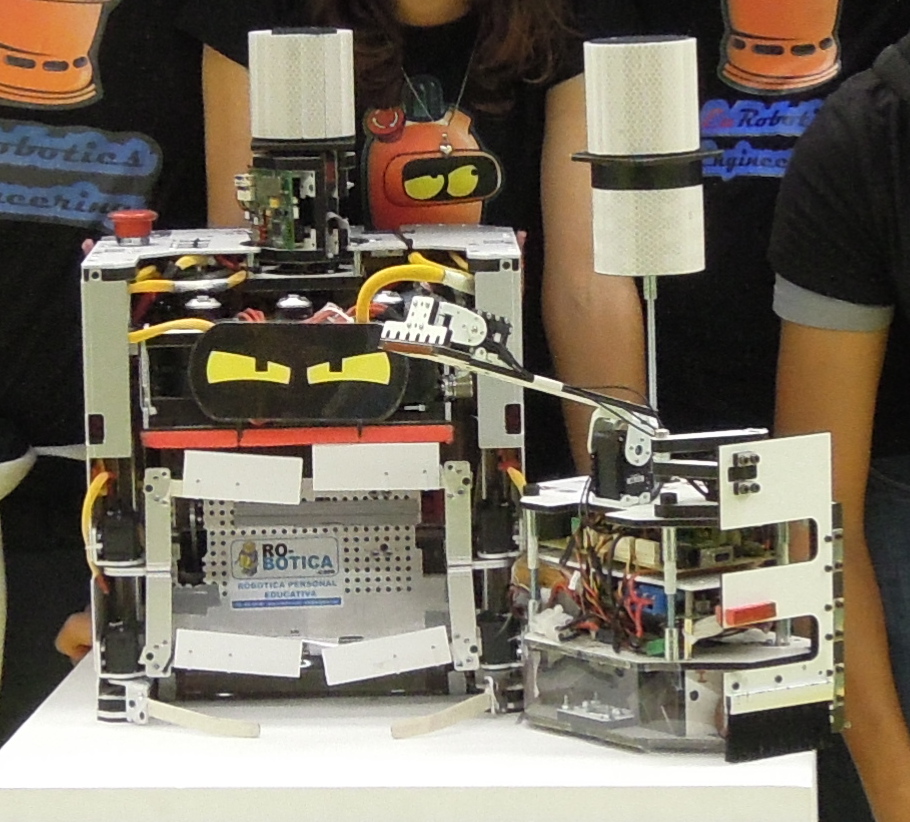
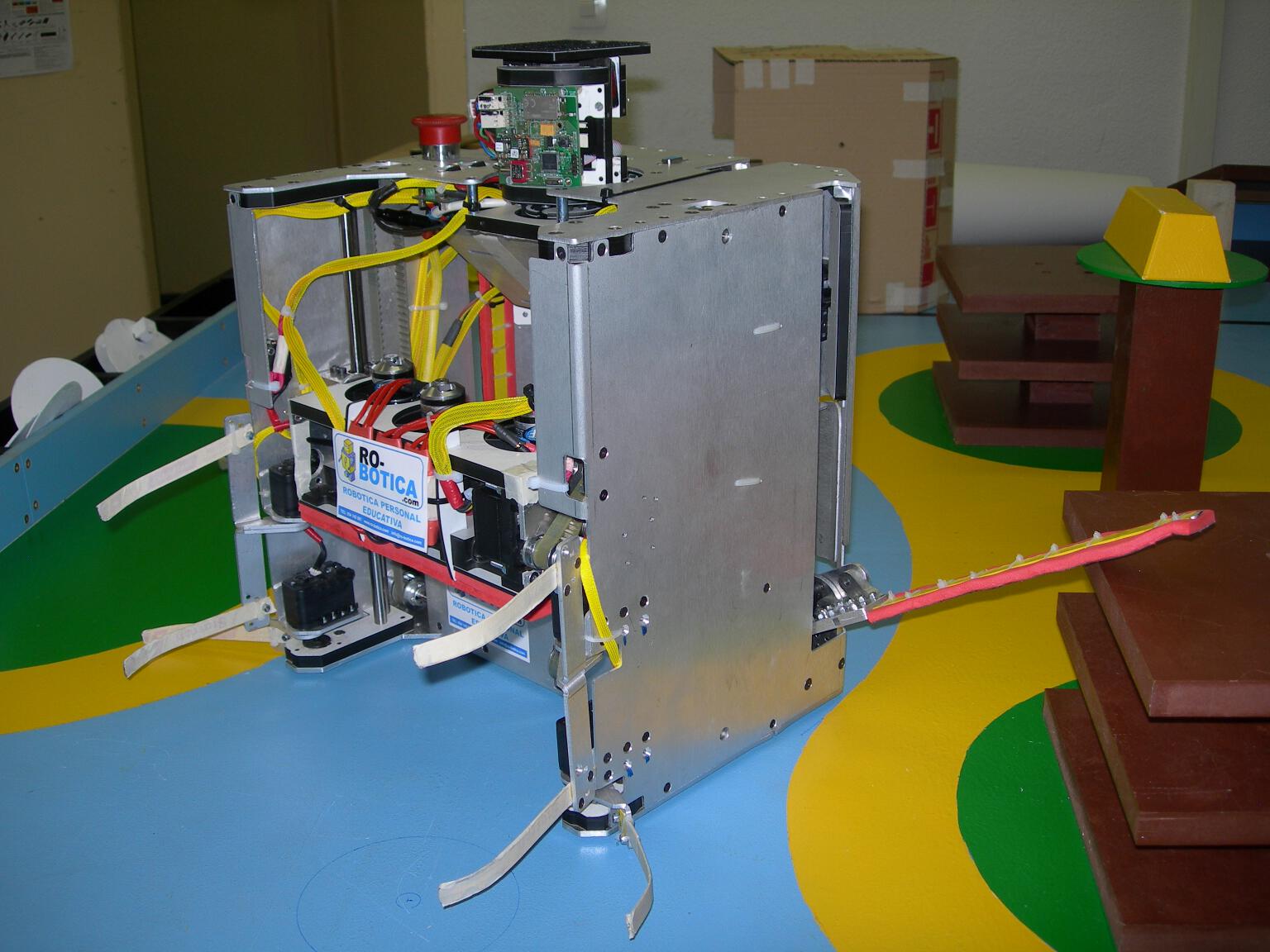
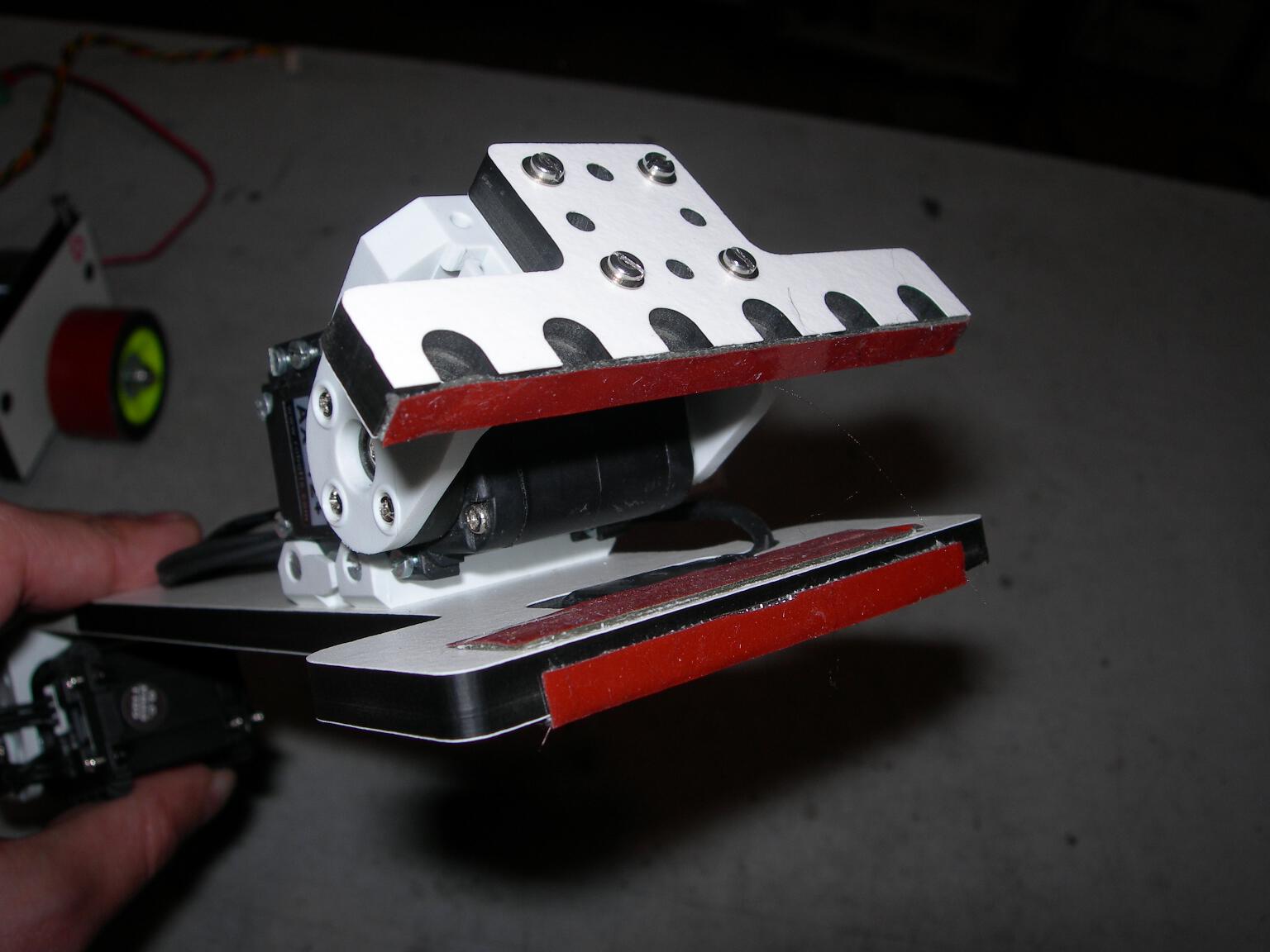
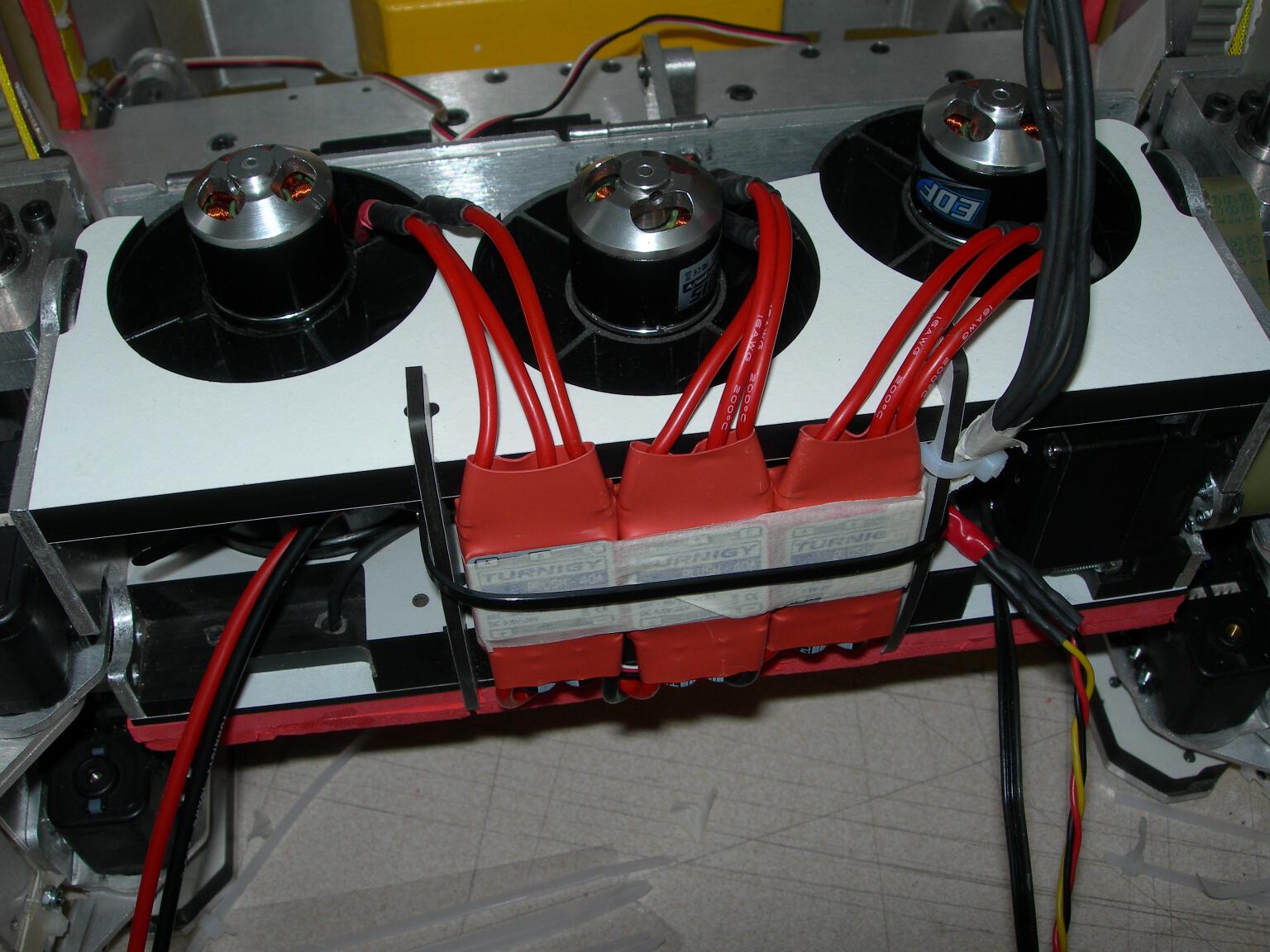
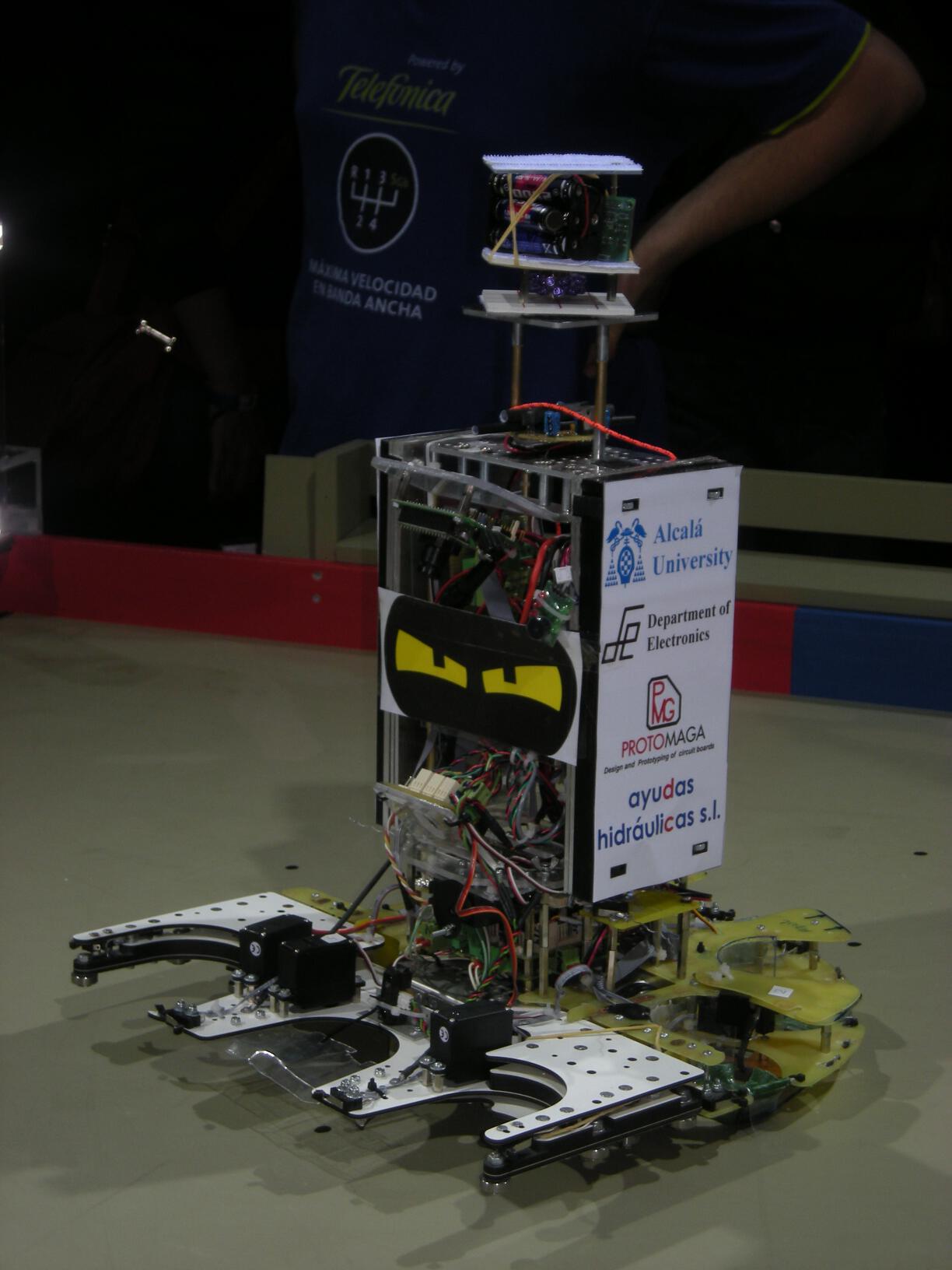
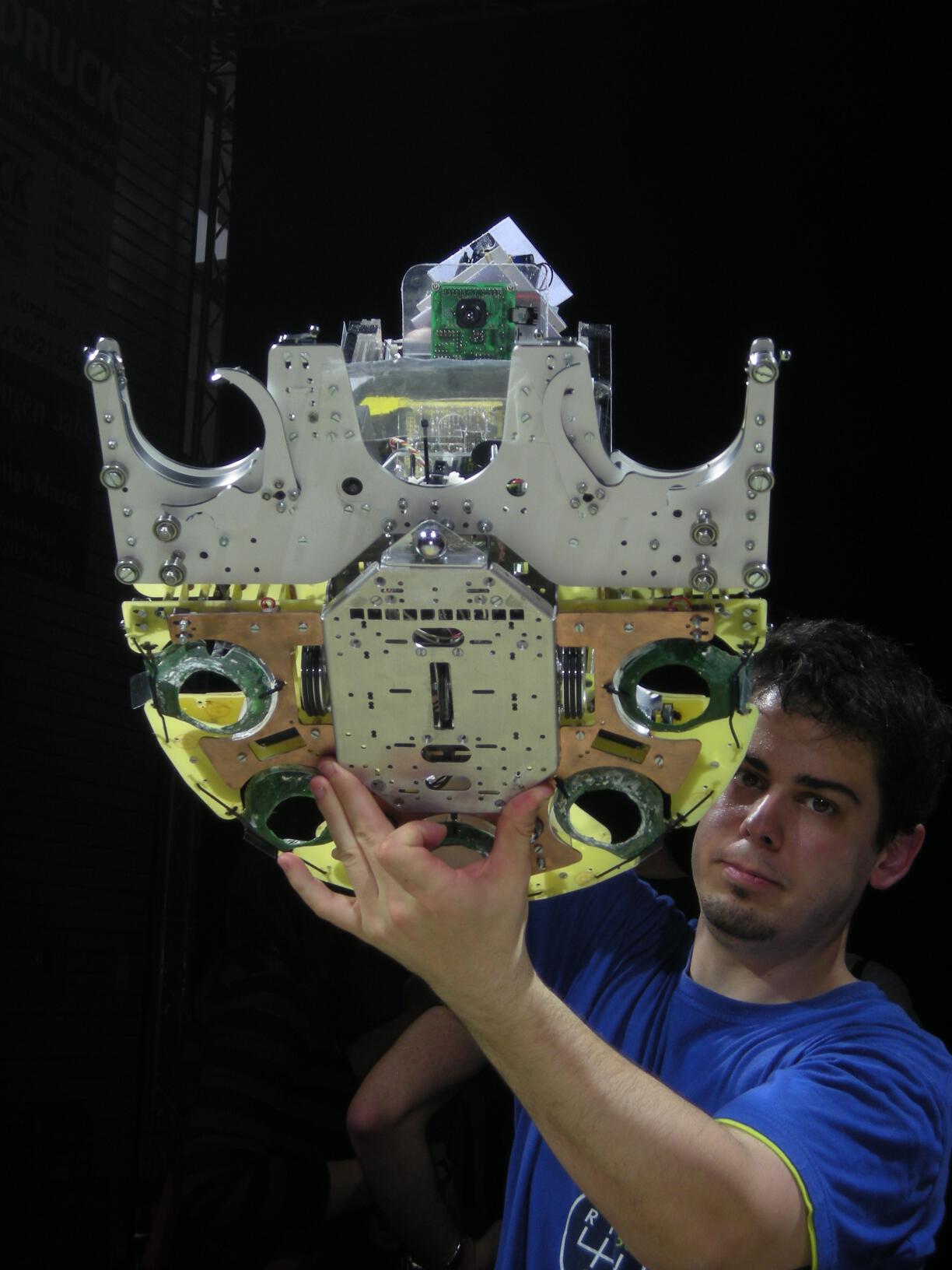
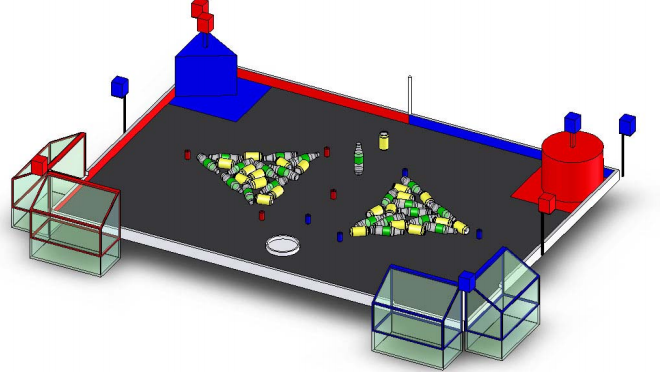
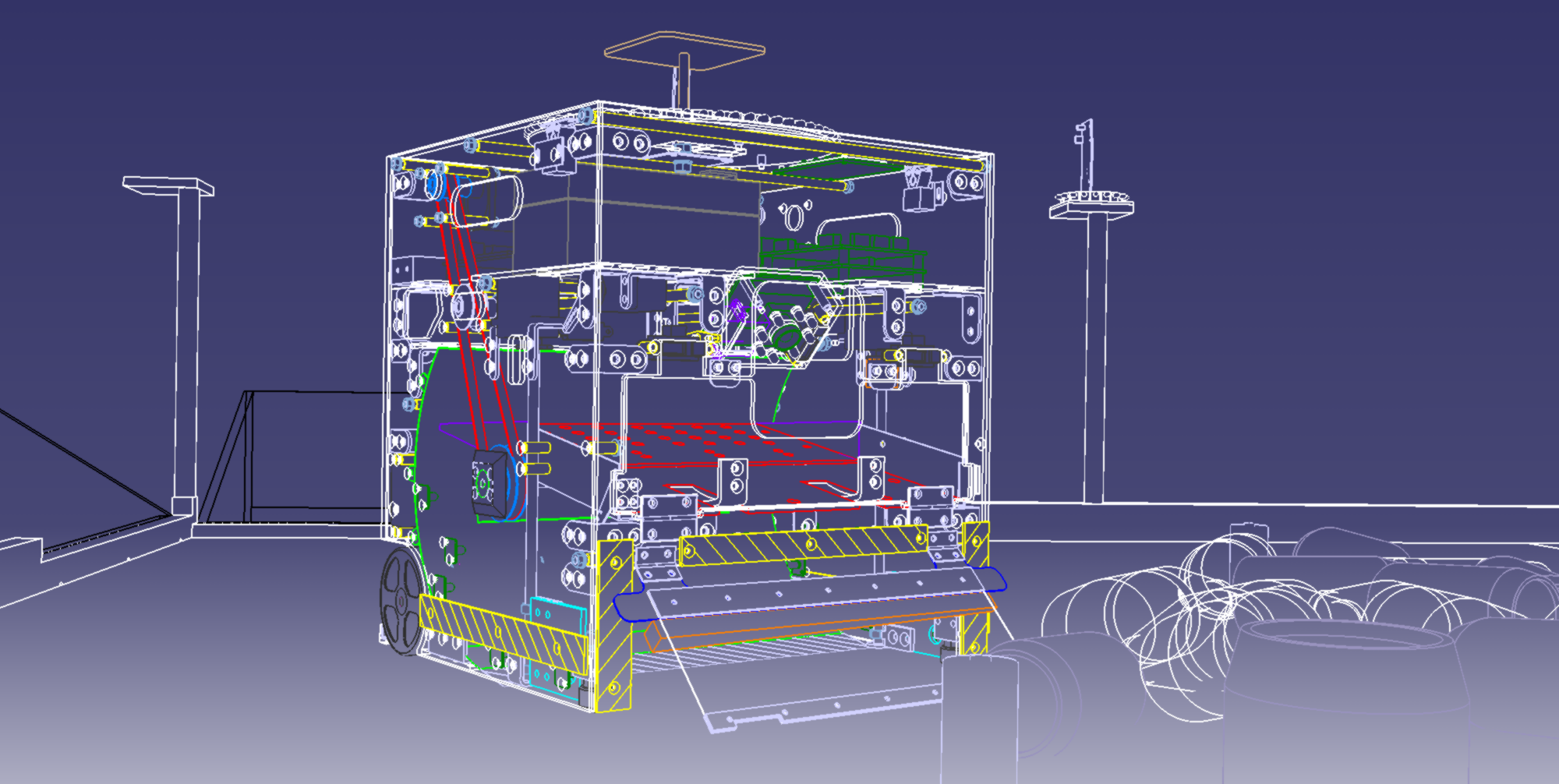
For Eurobot 2015 the robots had to go work in the cinema industry: they filled cups with popcorn at the popcorn machines, construct spotlights, close clapperboards and unfold the red carpet.
We decided to travel with the robots and not only participated in the national classification for the finals in Yverdon-les-Bains (Switzerland) but also participated in the national contests of Belgium and Germany. Each of them made the robots improve greatly while living new adventures.
The next slide shows a selection of images of our robots P.Tinto y Tirantes and next a compilation of videos of each competition.











2014
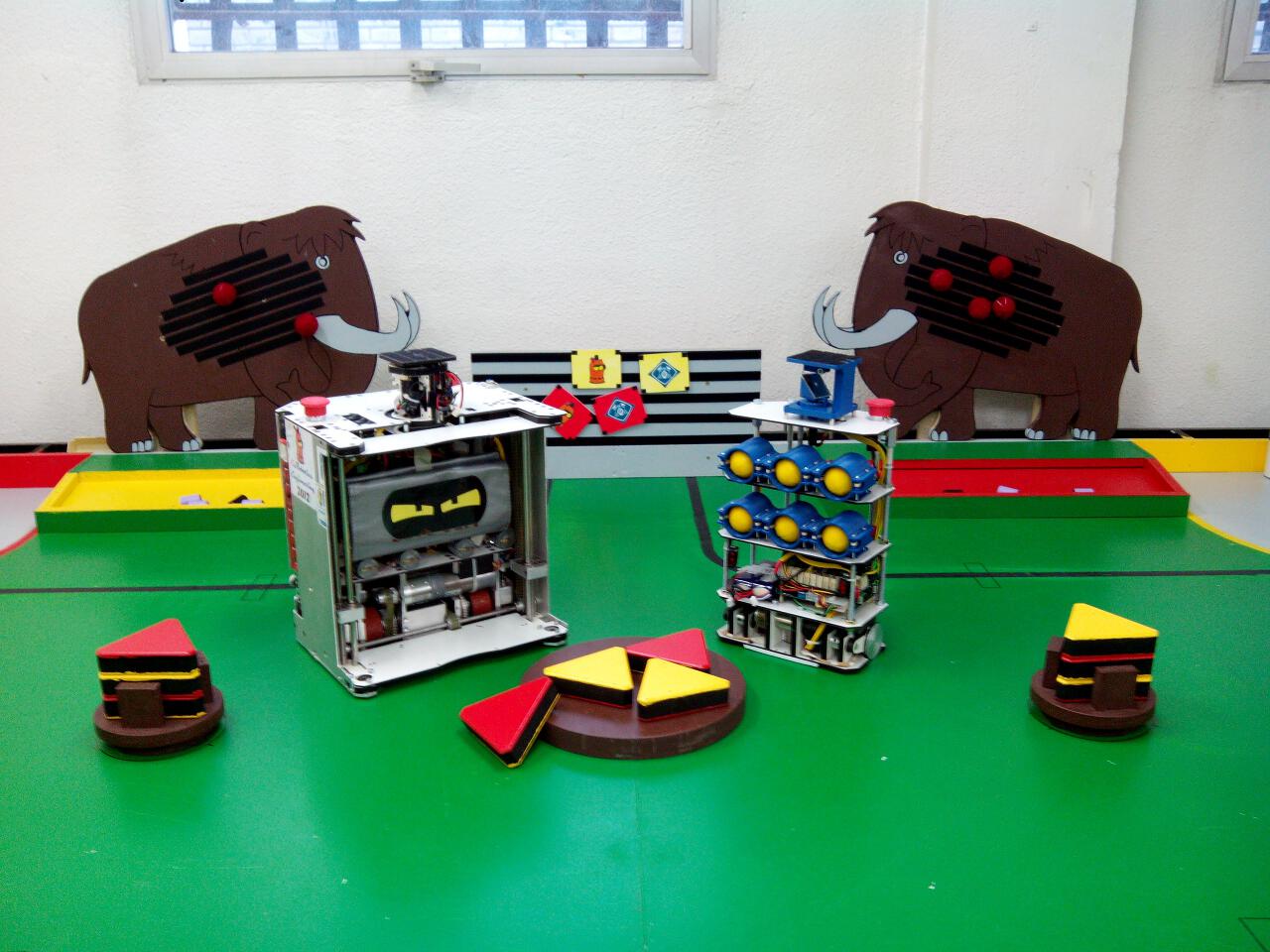
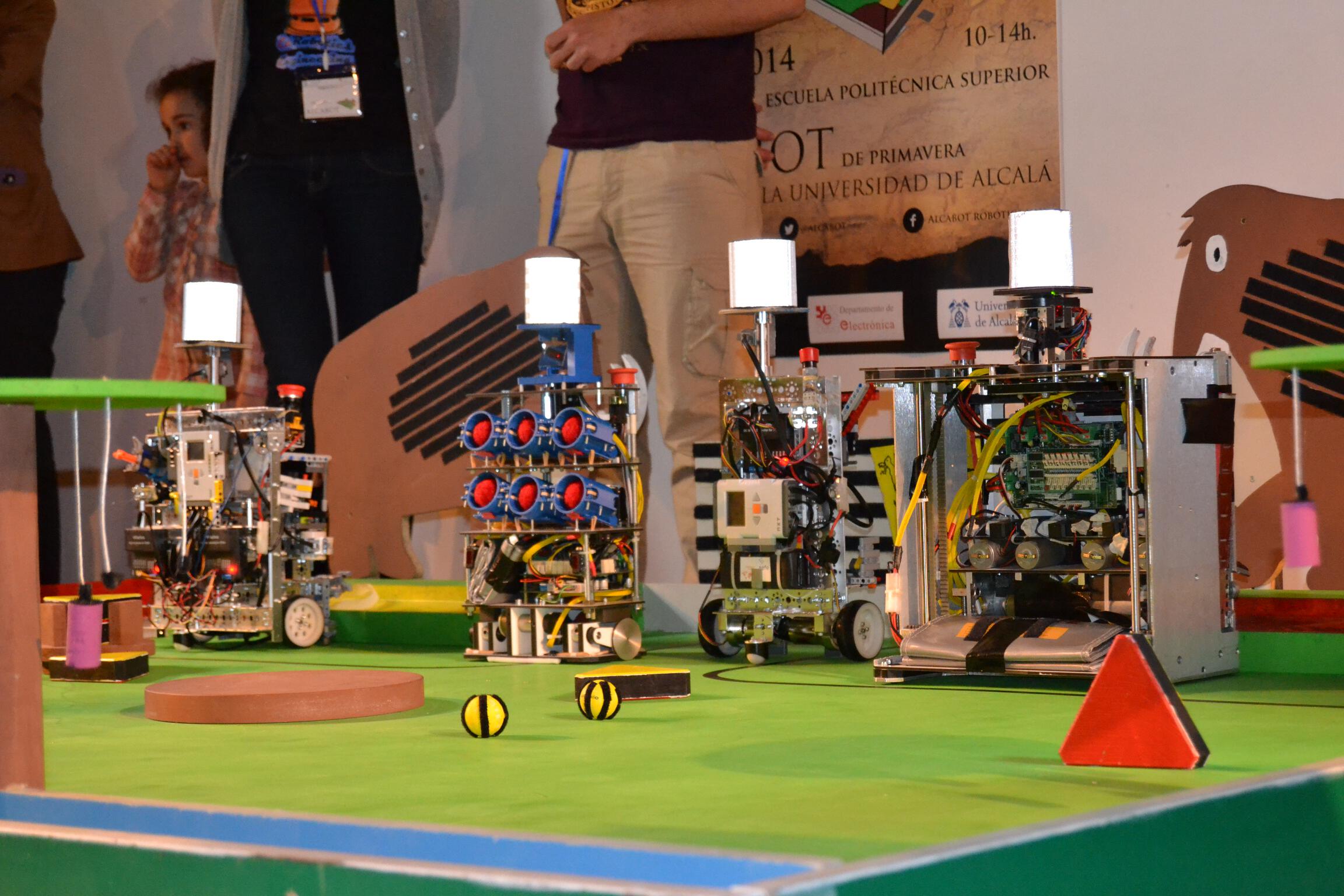
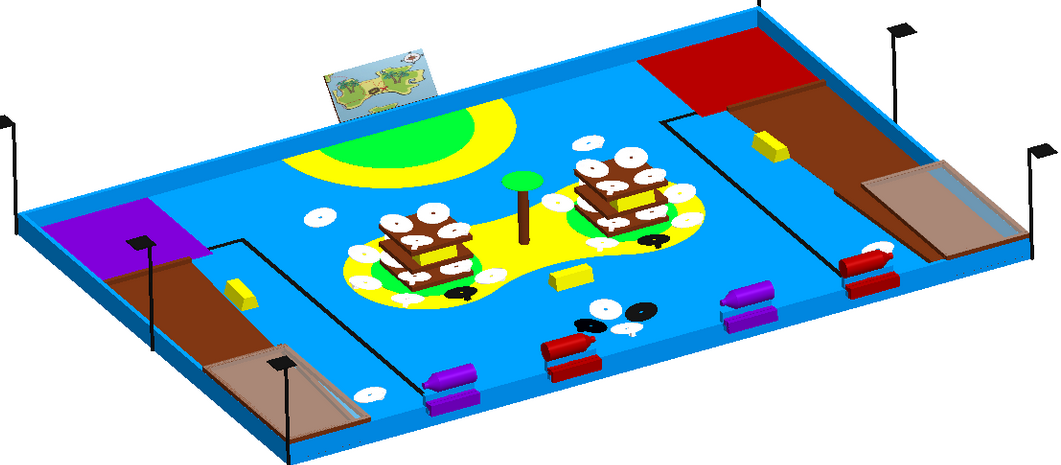
Eurobot 2014 – Robots Grosnik y Seskäpa
In 2014 They Traveled to prehistory, Where They Had to collect triangles of fire, hunt mammoths balls by shooting them (spears) and catch them with a net, And Also fresh paint on a stone.
We built two robots, Grosnik and Seskapa. Seskapa, the smallest, was in charge of shooting the mammoth hunt With the network and on the fresh paint. Grosnik With His arm would gather the fire, store it and fires create.

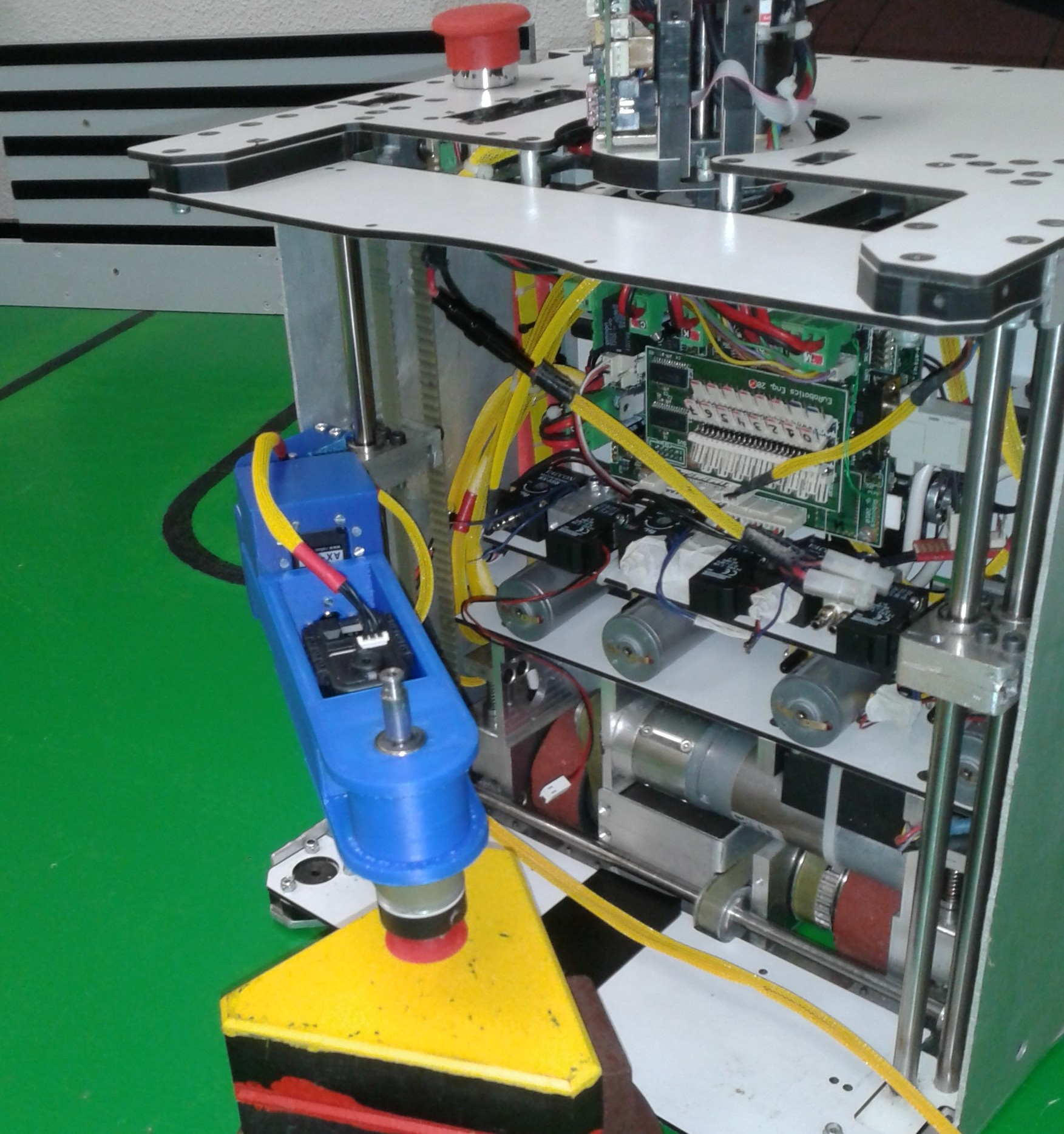







That year we evolved technologically to develop new electronics, we learned to make mechanical elements using 3D printers, we developed a Bluetooth communication system between robots and simulator based on computer simulation on Python language. Thanks to this simulator two of the team members were able to program the robot strategy from Germany while the rest of the members were working on robots from Spain.
Seskapa and Grosnik managed to qualify for the final of Eurobot in Dresden (Germany), where they finished in 23rd place ranking.
Click Play to watch the list of videos of our 2014 robots, including the finals in Dresden (Germany)
2012
Eurobot 2012 – Robots Crispín y Automático
In 2012 the robots played at being pirates who had to gain more loot on his boat: gold bullion, coins; find the map of hidden treasure and send messages in bottles.
We built Crispin and Automatico. Crispin, the smallest robot was responsible for discovering the treasure map with a clip and carry coins and bullions to the boat with his sidearm.
Automatico had an air suction system with which he grabbed and stored bullions. He was also able to store coins and send messages in bottles. Both robots were using the technology we developed in 2010.
Our robots were classified Eurobot final stop in La Ferte-Bernard (France), which managed to reach the quarterfinals.








Click Play to watch the list of videos of our 2012 robots, including the finals in La Ferté-Bernard (France)
2011
Eurobot 2011 – Robot Zamorano
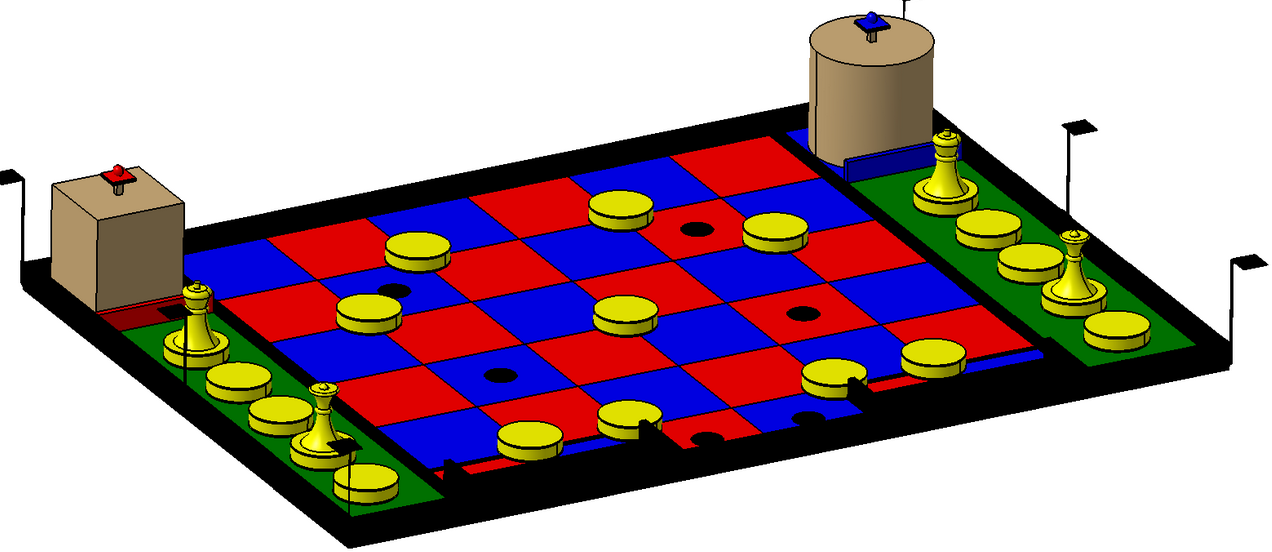
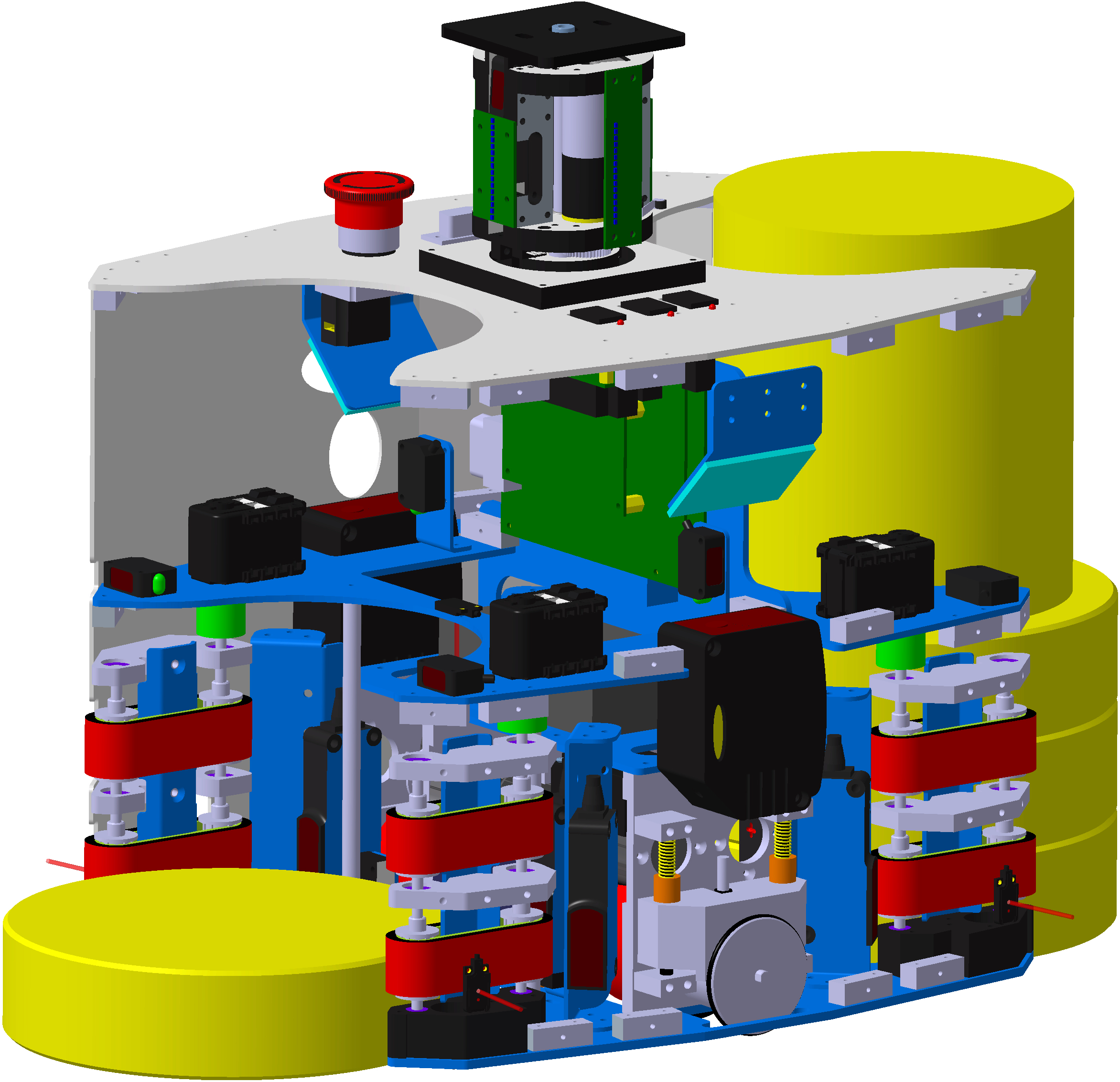
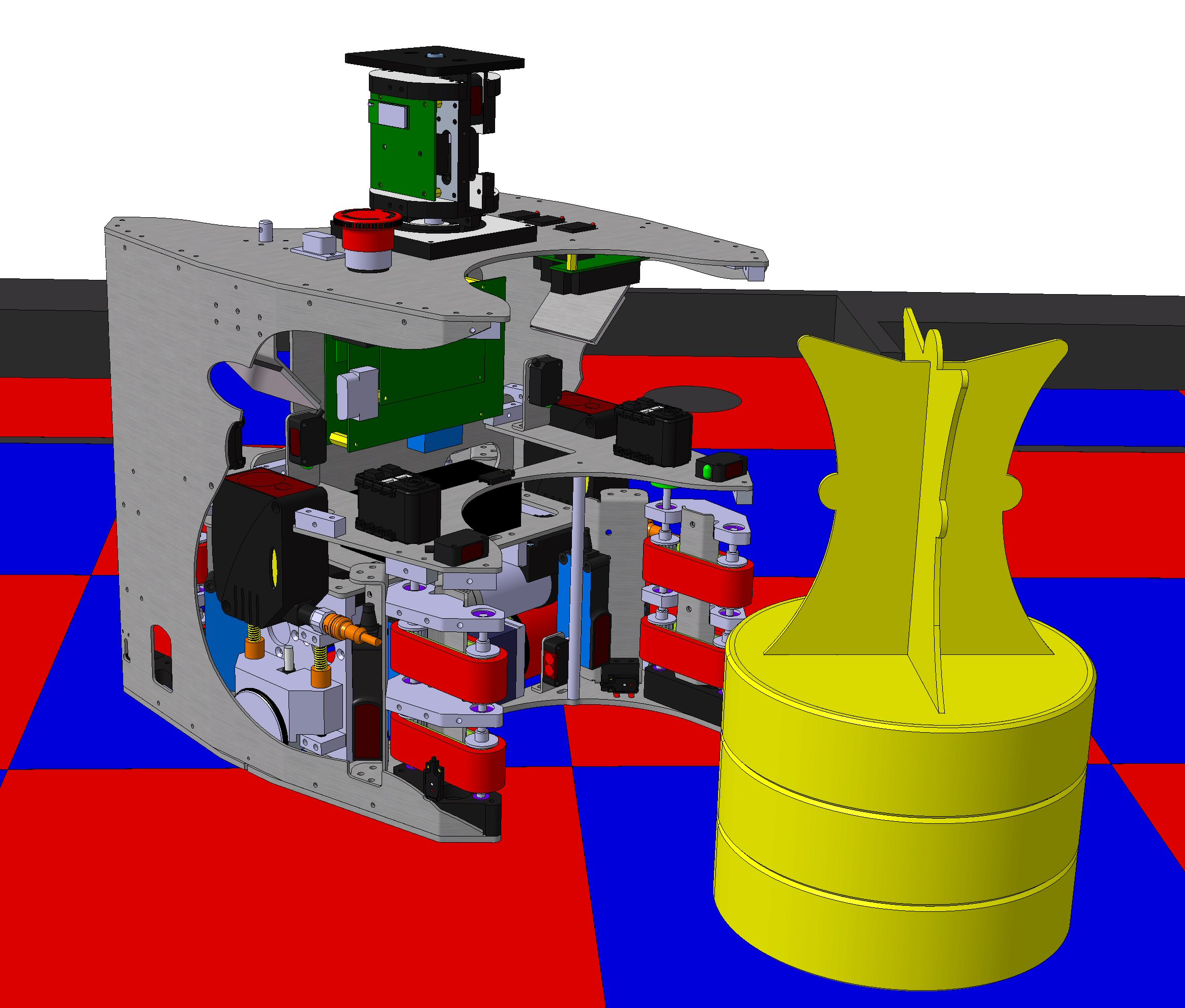
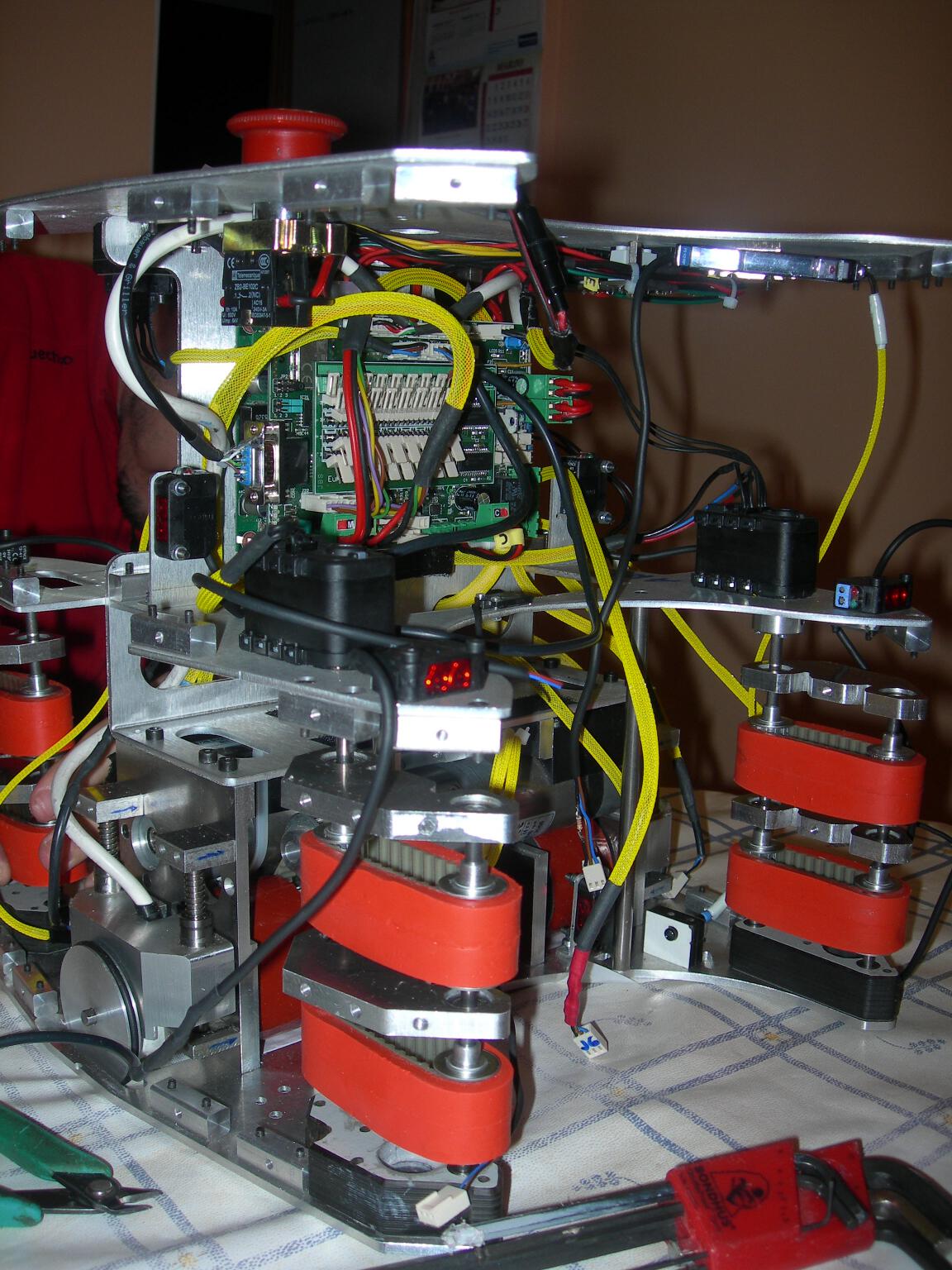
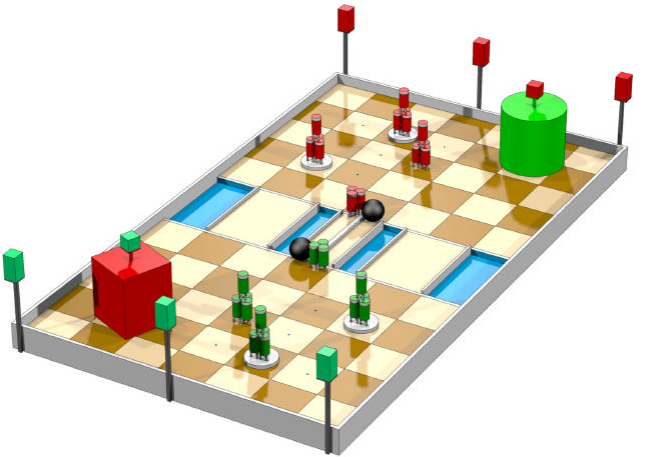
In 2011 the robots had to play Chess in a field with squares of both colors. The goal was to put more pawns on the squares of their color. In addition, building towers with two pawns and a queen or king gave an extra score.
Zamorano was the robot with which we compete, and it was the result of our technological evolution, 2010. He had very simple mechanics but it was a very quick and intelligent robot. Zamorano was not able to make own towers of chips, but his intelligence allowed him to detect if the opponent had a tower and move to a square of his own color.
This year we qualified first for the final of Eurobot in Astrakhan (Russia) where we get to the quarter-finals, winning the quarter but not moving to the next phase by an unfair arbitration decision.








Click Play to watch the list of videos of our 2011 robots, including the finals in Astrakhan (Russia)
2010
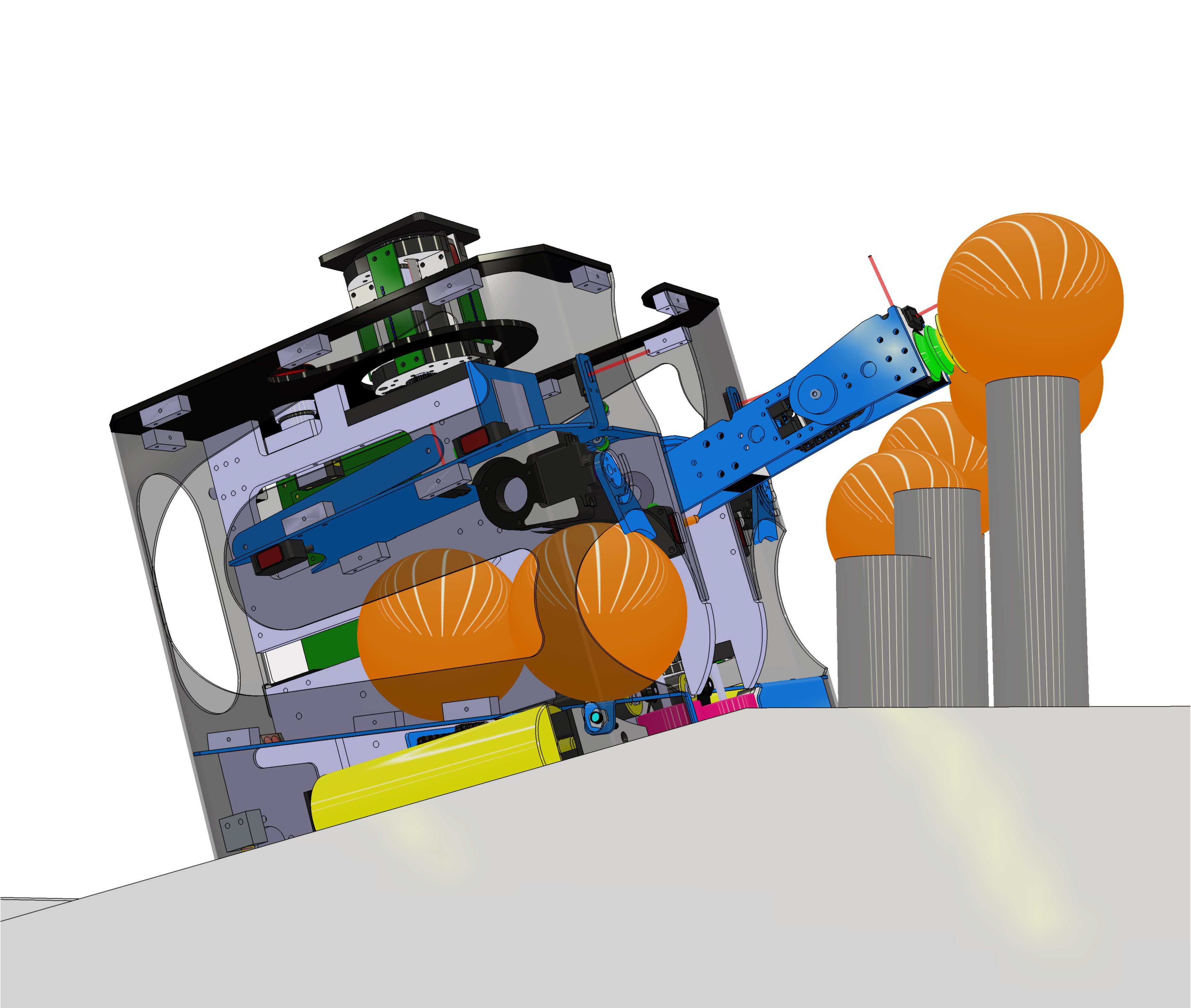
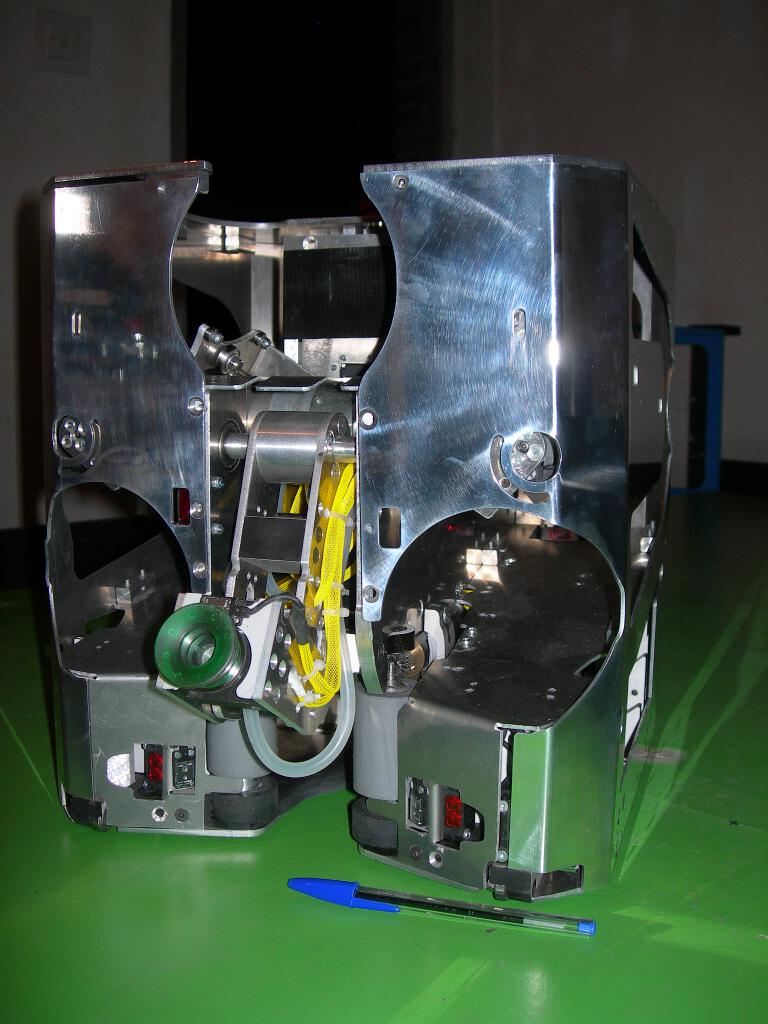
Eurobot 2010 – Robot Trompetero
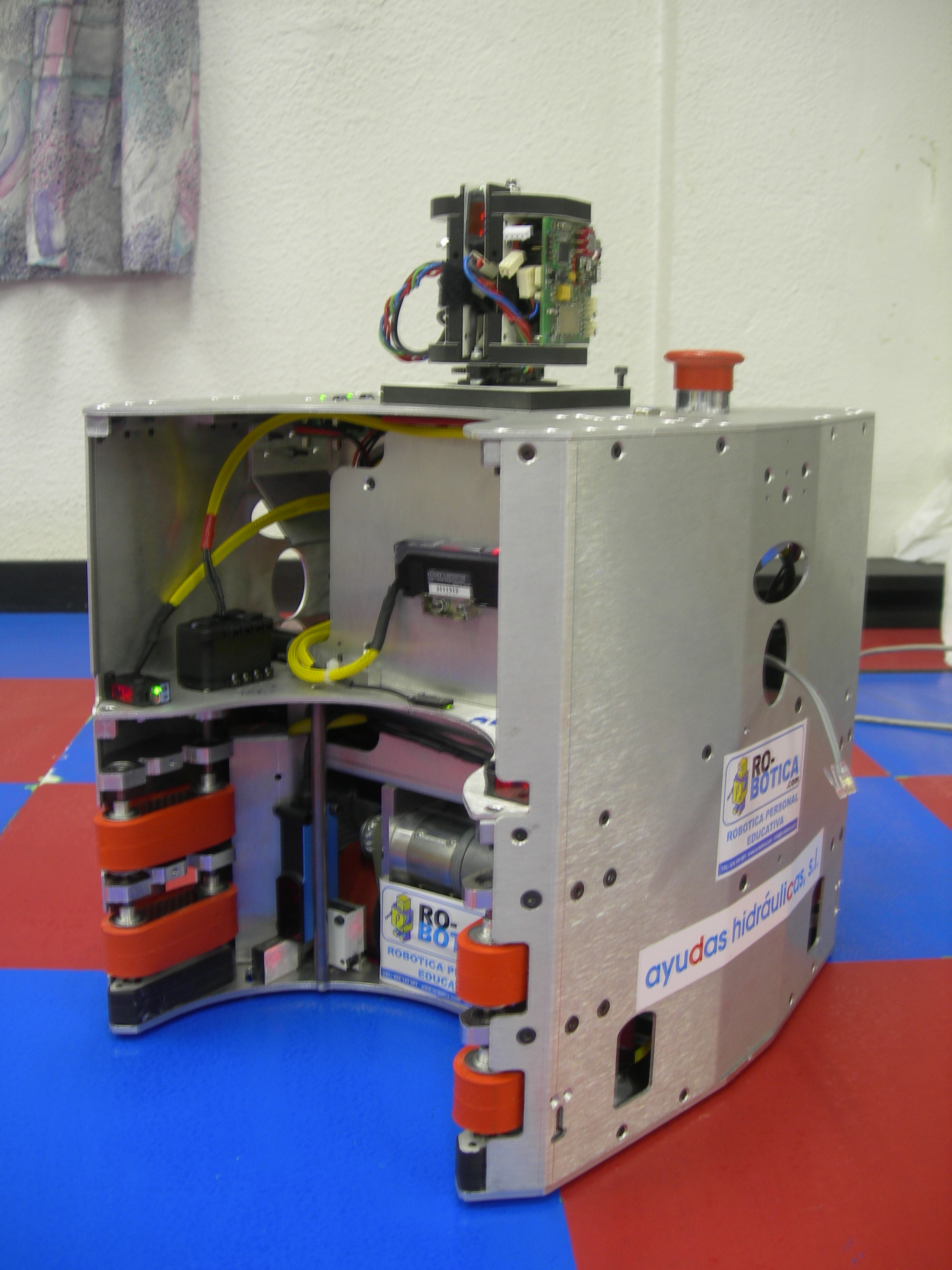
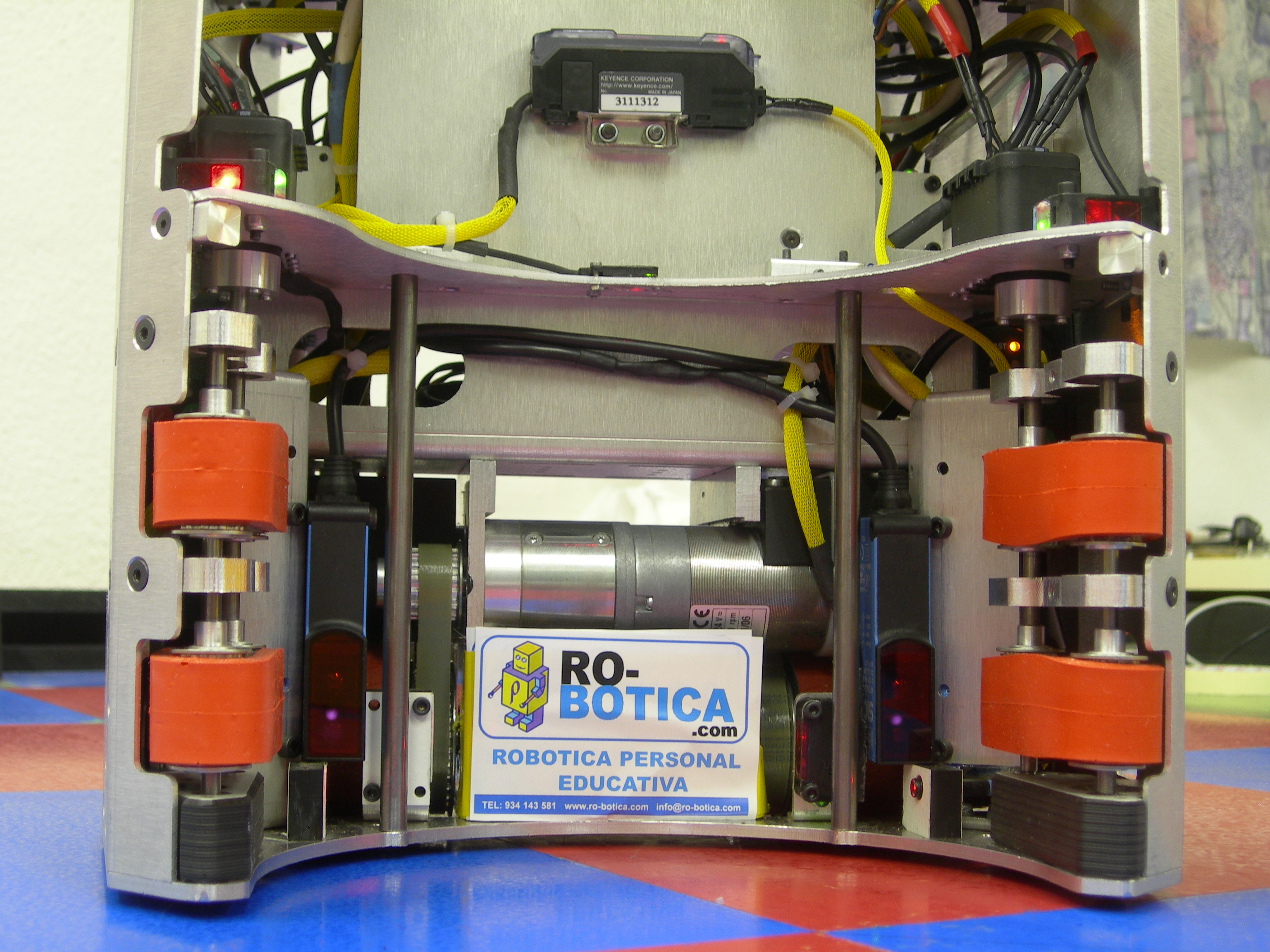
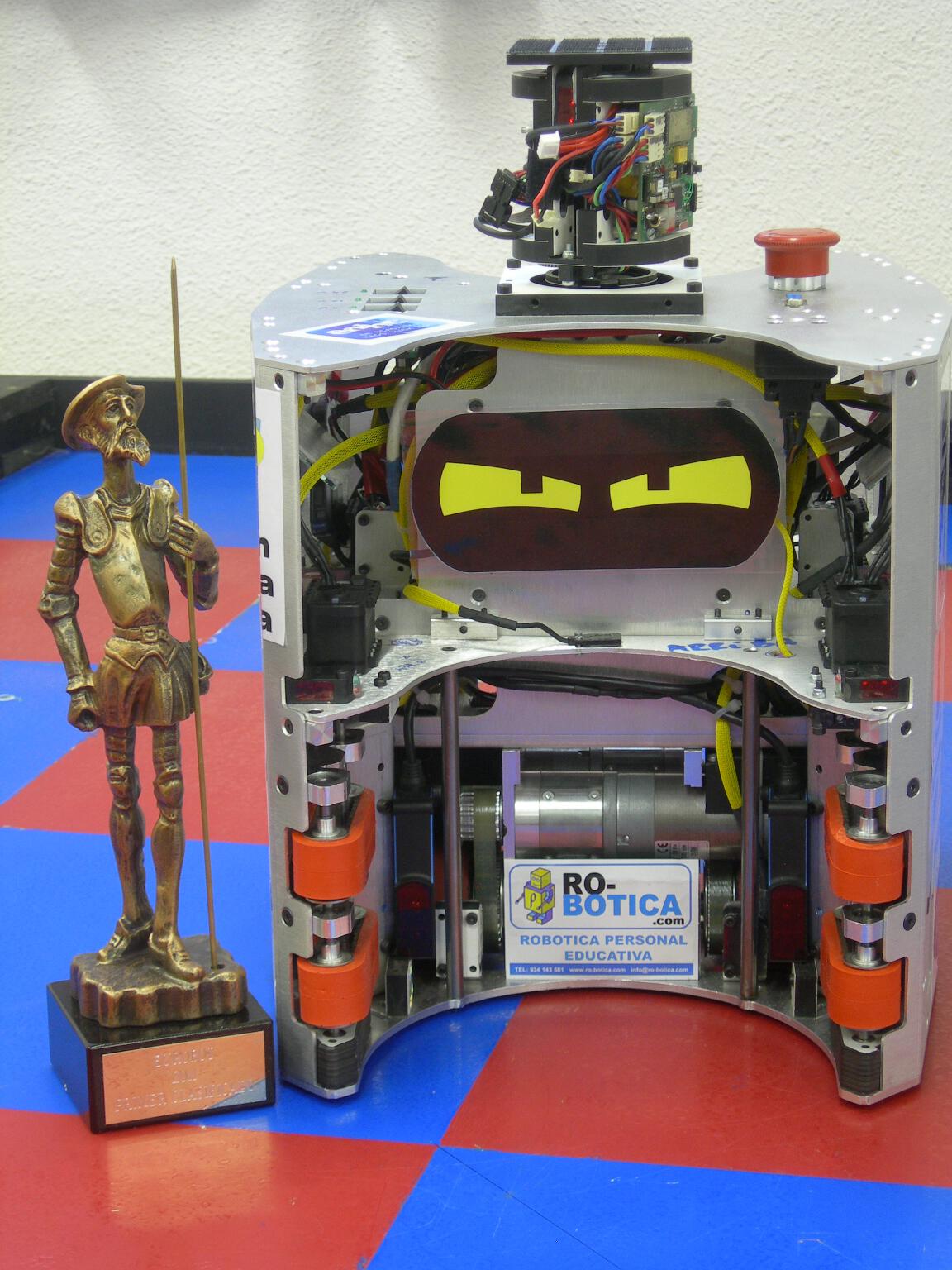
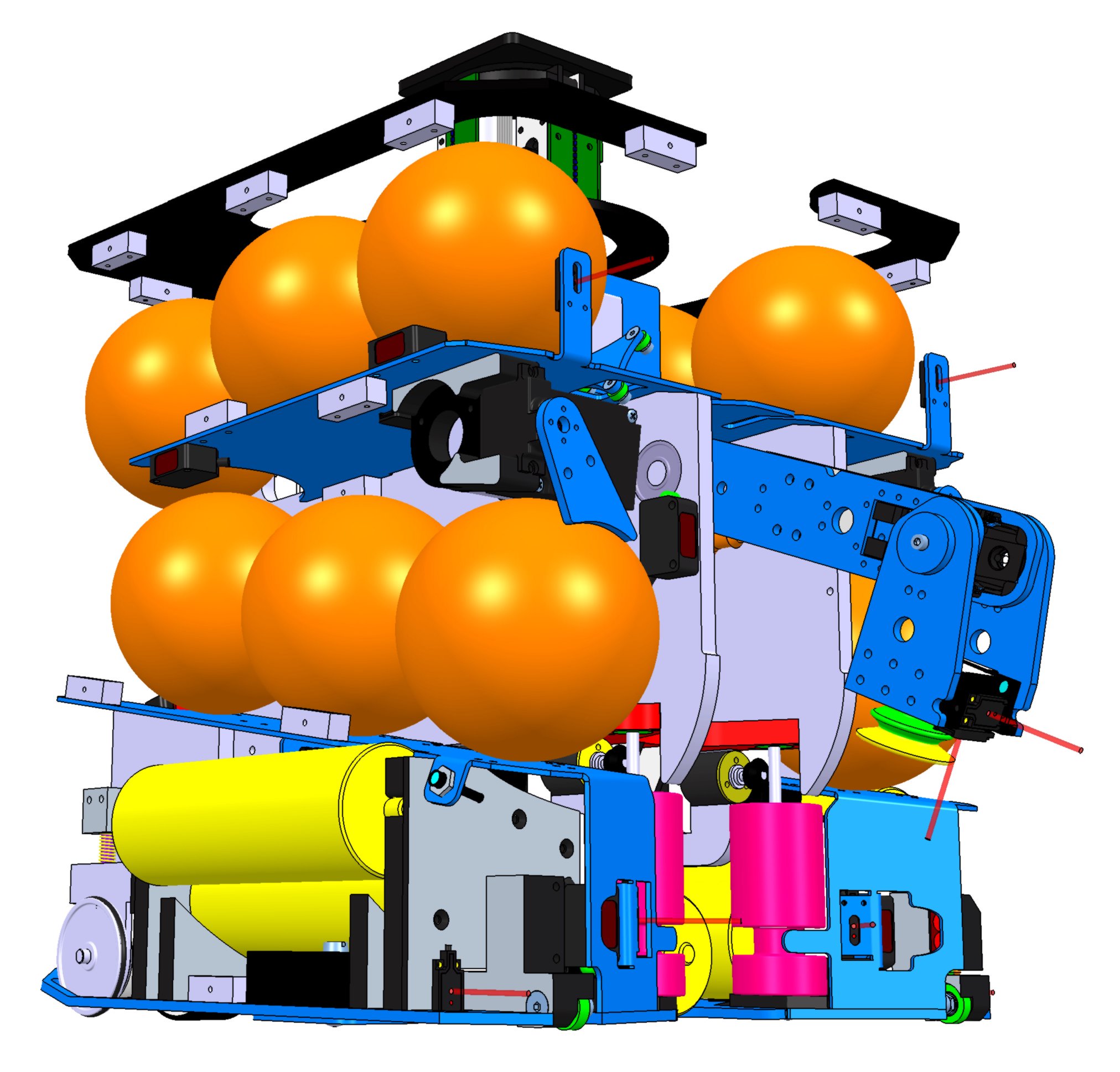
In 2010 the robots had to “feed the world” by collecting ears, tomatoes and oranges.
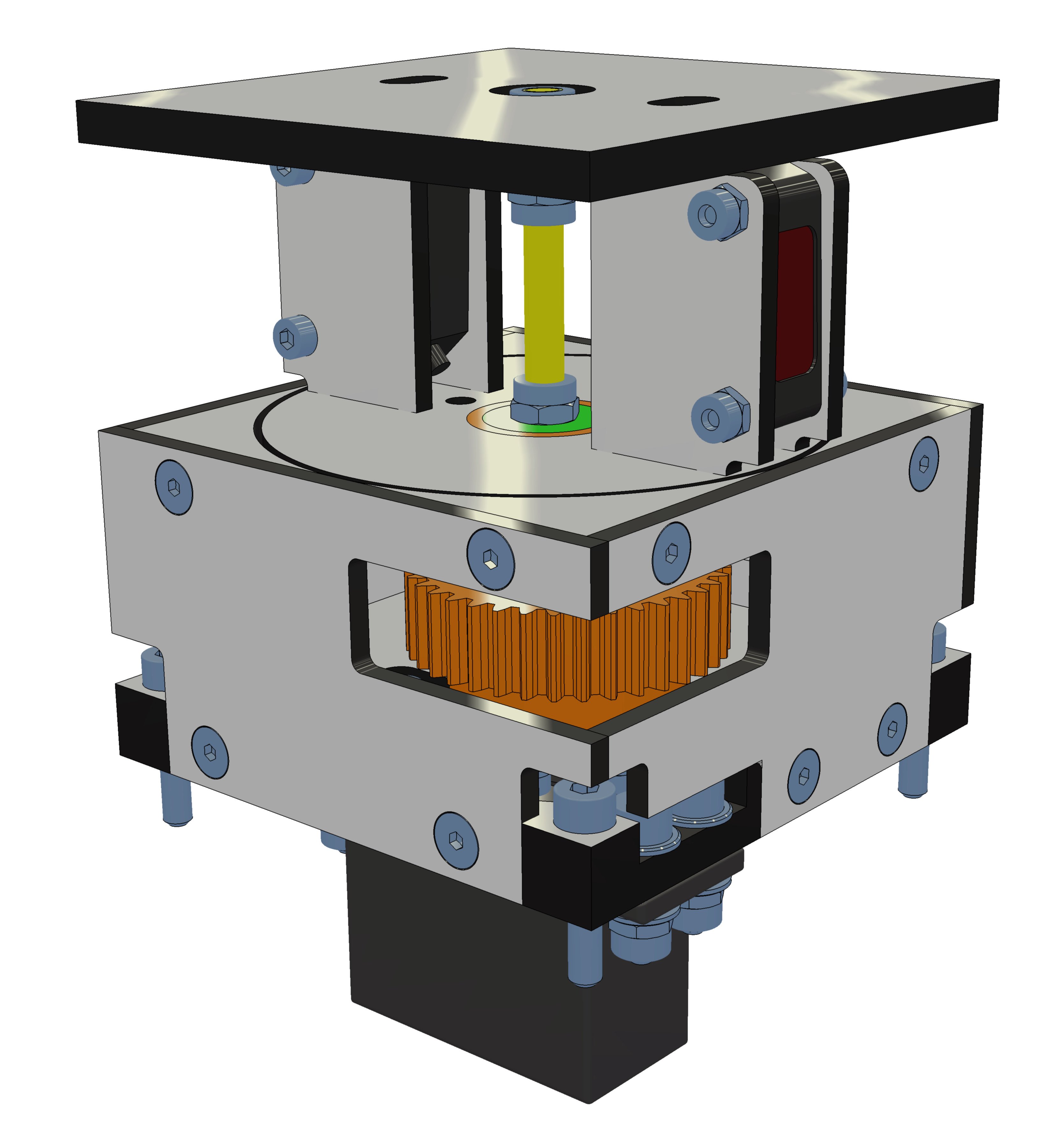
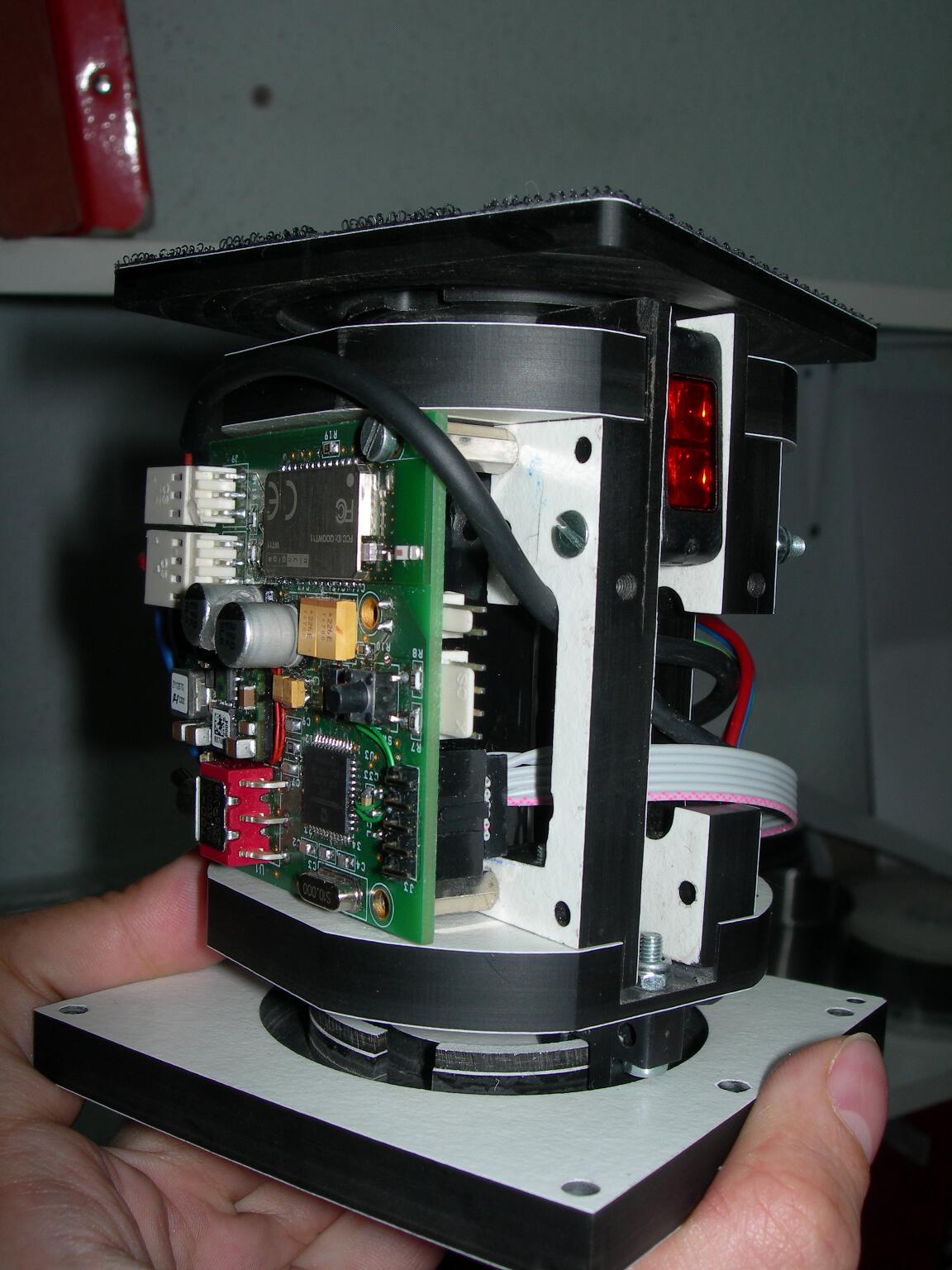
This year built two robots,Trompetero and MicroC. We built Trompetero using aluminum and Trespa, and began using Aversive libraries from Microb that helped a lot to evolve technologically. Trompetero had an arm that collected oranges and tomatoes, a positioning system with encoders to the ground and a detection system that allowed her opponent to monitor their position at all times.
On the other hand, MicroC was a robot made entirely of Trespa. He was a robot with an original system that allowed him to move around the field picking without worrying about the black ears, which were anchored to the ground.
Both robots are qualified for the final of Eurobot in Rapperswil-Jona (Switzerland), ending Trompero in MicroC position 32 and position 19.







Click Play to watch the list of videos of our 2010 robots, including the finals in Rapperswil-Jona (Switzerland)
2008
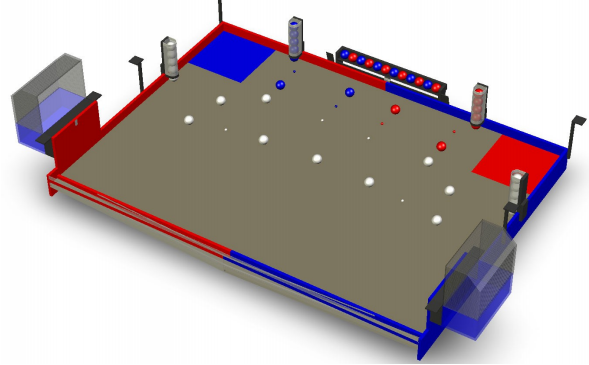
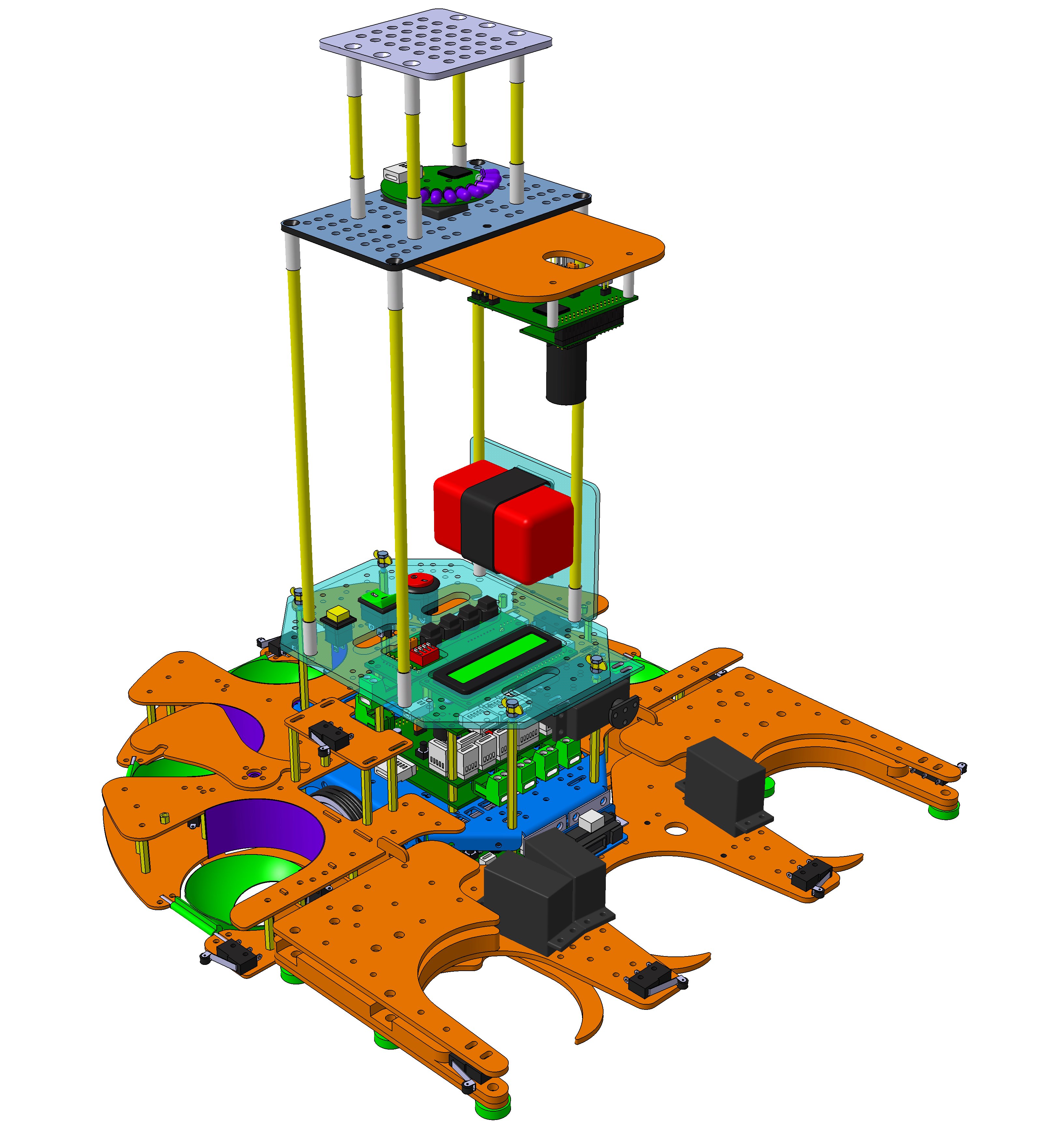
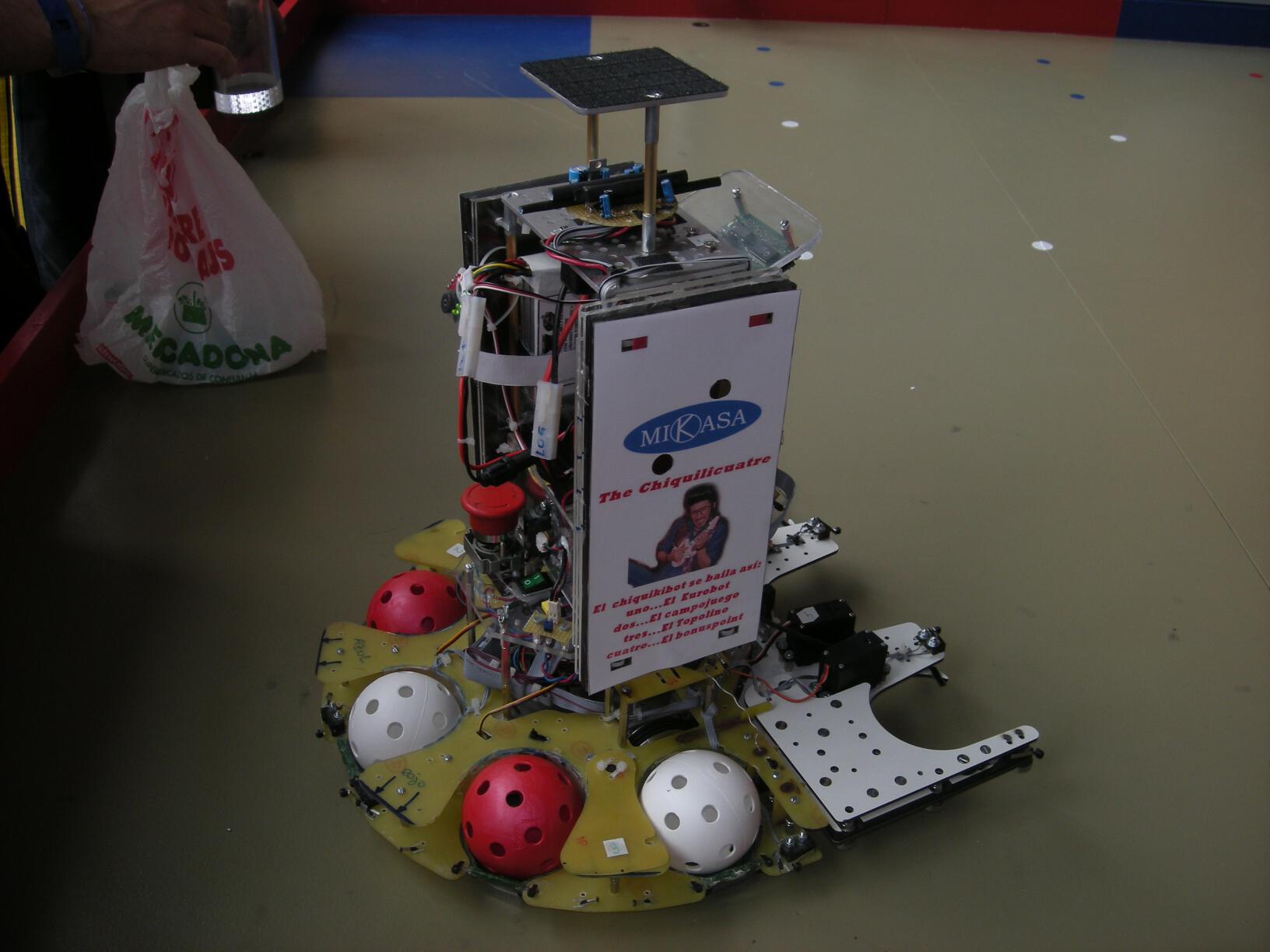
Eurobot 2008 – Robot Topolino
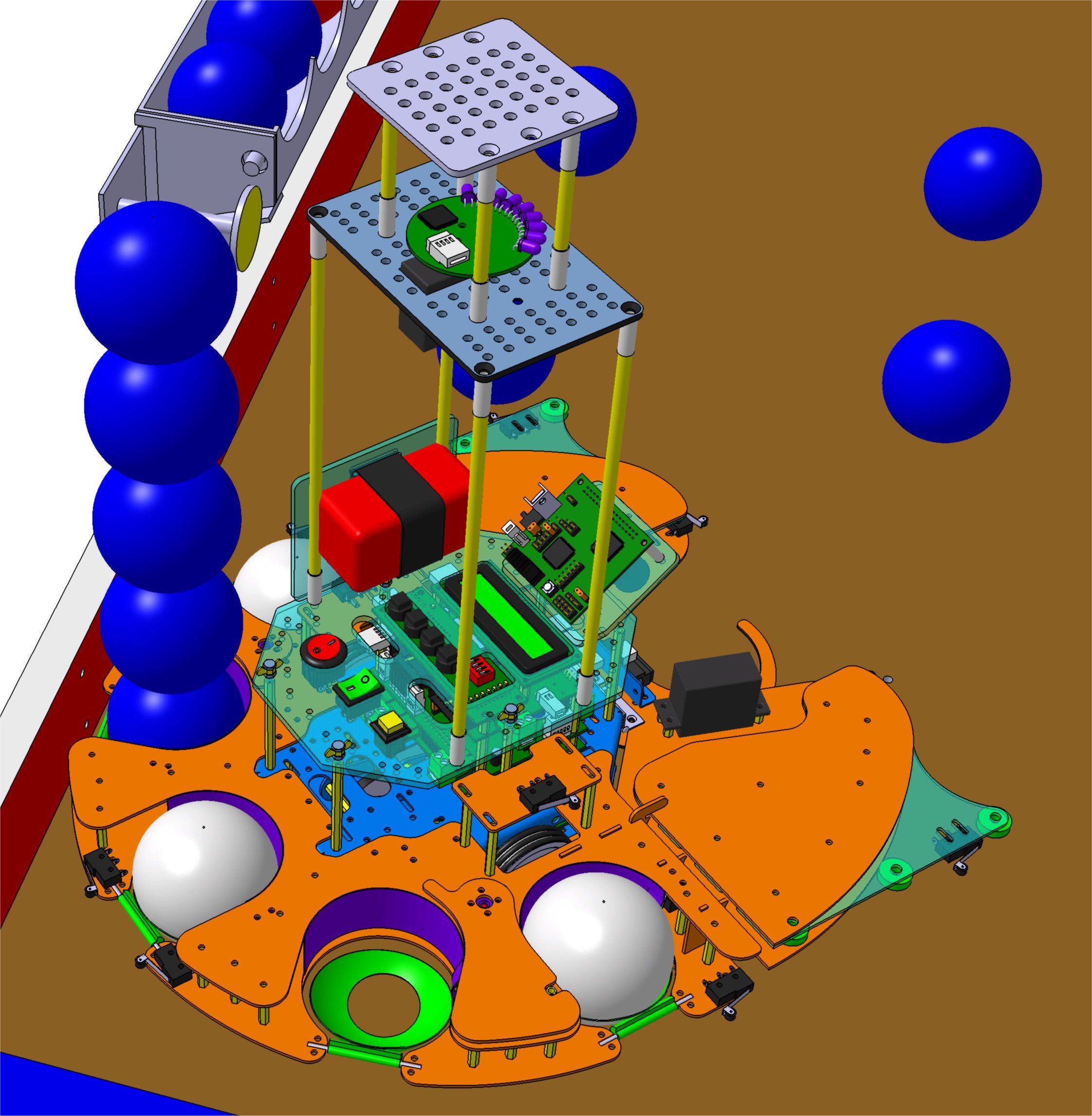
In 2008 the robots traveled to Mars. This year they had to collect samples of their color (red or blue). If a white sign was also interspersed between two red or blue they would obtain higher score.
Our robot, Topolino, was able to collect samples and arrange to get the highest score. It was made of aluminum, fiberglass and Trespa.
Topolino qualified for the final of Eurobot in Heidelberg (Germany) where he managed to reach the second round. In addition, Topolino received the award for “Best robot concept” (Best Concept Prize) thanks to its original and unique system to collect and classify samples of Mars.




Click Play to watch the list of videos of our 2008 robots, including the finals in Heidelberg (Germany)
2007
Eurobot 2007 – Robot Mr. Proper
2007 was the year in which robots played to collect and sort waste you would find scattered on the field: plastic bottles, cans and batteries. Each element had a score and should be stored in the corresponding container.
This year we participated with Mr Proper robot. Mr Proper was able to collect and classify all the elements. To do this it used the positioning system we developed in 2004 and a network of dsPIC microcontrollers.
Mr Proper unfortunately failed to qualify for the final of Eurobot this year due to technical problems in Spain Eurobot Cup.





Click Play to watch the list of videos of our 2007 robots, including the finals in La Ferté-Bernard (France)
2005
Eurobot 2005 – Robot Campanolo
On 2005 the robots went bowling. Like the previous year, up to two robots per team were allowed. Each team started from one side of the field with all his pins standing on the ground. The robots had to pass across the field to pull pins from the opponent through a bridge located at random positions. Besides, robots could shoot squash balls to knock down the pins at a distance. Robots after the game had more pins standing won.
Our robot, Campanolo, was made ofTrespa and was able to wipe out all the pins of the opponent. Campanolo had 4 giant slingshot to shoot four balls and squash which could topple the towers Bowling opponent from the other side of the field. In addition, Campanolo had arms that allowed him, once on the other side of the field, bowling down those still standing in one try. Campanolo’s intelligence and his mechanical systems were programmed and controlled by two microcontrollers 8051.
Campanolo had a very remarkable navigation system, always moving in a straight line and parallel to the walls of the field and could not turn. The system consisted of two boxes one within the other. Each box had 4 wheels, but each case had their wheels in a direction of the field (4 wheels to the long side of the field and the other four to a wide part). When the robot would move along the field, Campanolo pulled one of the boxes, whose wheels made contact with the ground while the other box was hidden. To advance across the field he would do the opposite.
Campanolo managed to qualify for the final of Eurobot in Yverdon les Bains (Switzerland) where he finished 19th in the ranking. Also thanks to this peculiar and original system to get around the field Campanolo was nominated for the award for “Best robot concept” (Best Concept Price).
Campanolo is currently exhibited in the Museum of Juguetrónica robotics shop in Madrid.







Click Play to watch the list of videos of our 2005 robots, including the finals in Yverdon-les-Bains (Switzerland)
2004
Euobot 2004 – Robots Electrococo and Joselito
In 2004 the robots had to play “Rugby coconut”. It was allowed up to two robots per team. The team that had most balls (cocci) in the goals and the basket would win the match.
We built two robots, Electrococo and Joselito (smaller). Electrococo is made of Trespa and used the same technology Husillo (2003). He was able to find the balls using artificial vision, collect them and leave them in the goal or shoot them to the basket. To shoot from any point of the field, we developed a positioning system based on a crown of infrared sensors that allowed the robot to know its position in the field. Knowing his position, Electrococo could calculate the distance from the field and determine the firepower to score on it.
Joselito was constructed from a plastic bucket. It was the “doorman”, responsible for removing the balls that the opponent got into our goal. It was able to detect using artificial vision the balls and take them out of the goal. For this purpose, he used a camera and a microcontroller CMUCAM 8051.
Joselito Electrococo and got qualified for the Eurobot finals in La Ferte-Bernard (France).







Click Play to watch the list of videos of our 2004 robots, including the finals in La Ferté-Bernard (France)
2003
Eurobot 2003 – Robot Husillo
In 2003 the robots had to play “Heads or Tails”. The one who turned around the robot’s color chips would win the game. If moreover they made a tower they would get more points.
Our robot, Husillo, was a robot made of Trespa and had a system for stacking and turning at the same time the chips. Through a system of artificial vision Husillo was able to search for records and distinguish their color. A PC built with GNU / Linux implemented the intelligence and computer vision recognition using Open CV libraries. The movement of the robot and other mechanical systems was controlled through a network of 8051 microcontrollers.
Husillo got qualified for the final of Eurobot in La Ferte-Bernard (France).










Click Play to watch the list of videos of our 2003 robots, including the finals in La Ferté-Bernard (France)