Aquí podéis encontrar toda la información acerca de los robots con los que hemos participado en Eurobot.
2015
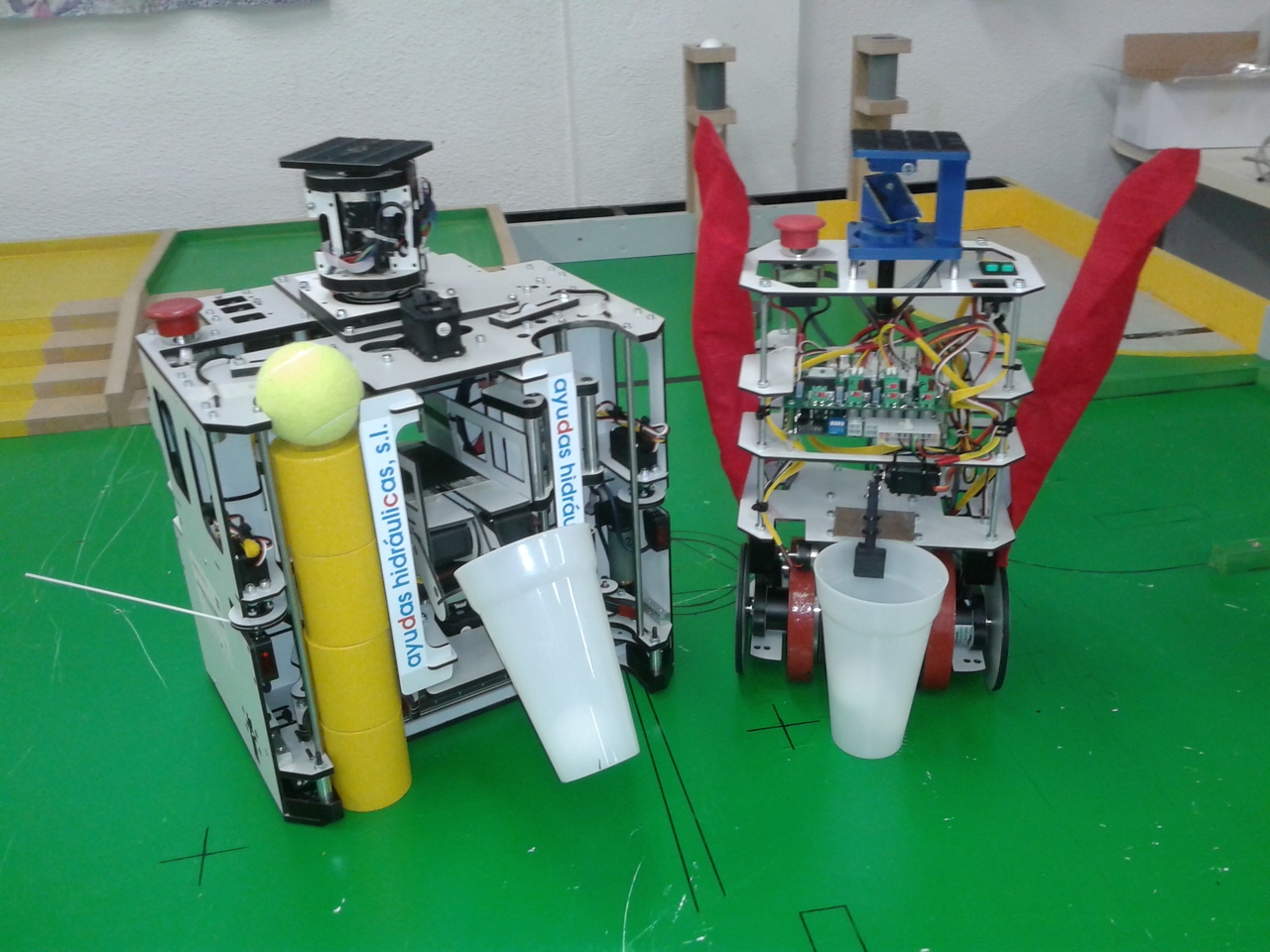
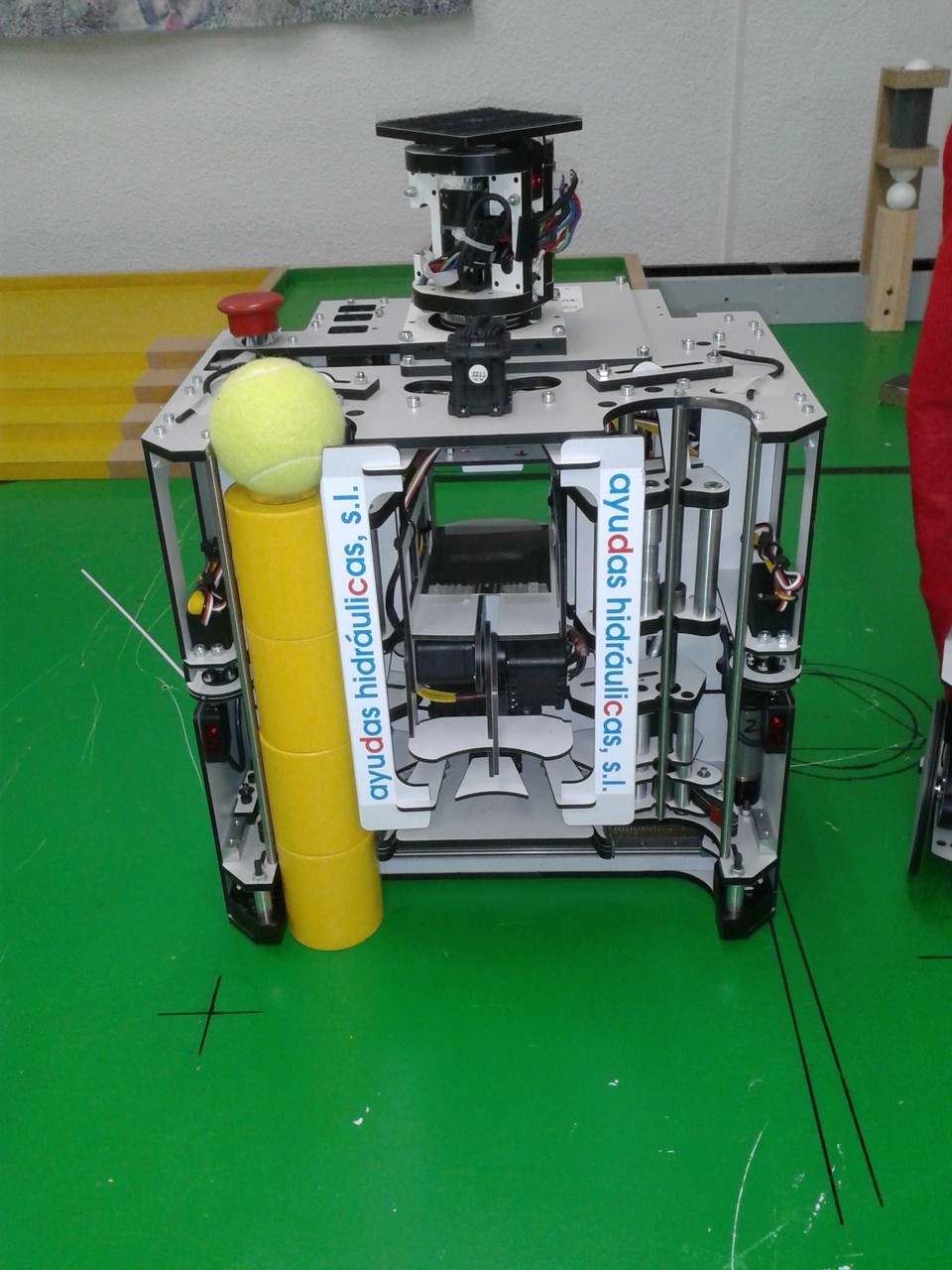
Eurobot 2015 – Robots P.Tinto y Tirantes
El año 2015 fue el último año que participamos en Eurobot y unos de los mejores de todos los que hemos participado en Eurobot.
Desde el año 2008 los nombres de nuestros robots han salido de la película de Javier y Guillermo Fesser «El milagro de P.Tinto». Que mejor año para para bautiza a nuestros robots con los nombres de P.Tinto y sus tirantes.
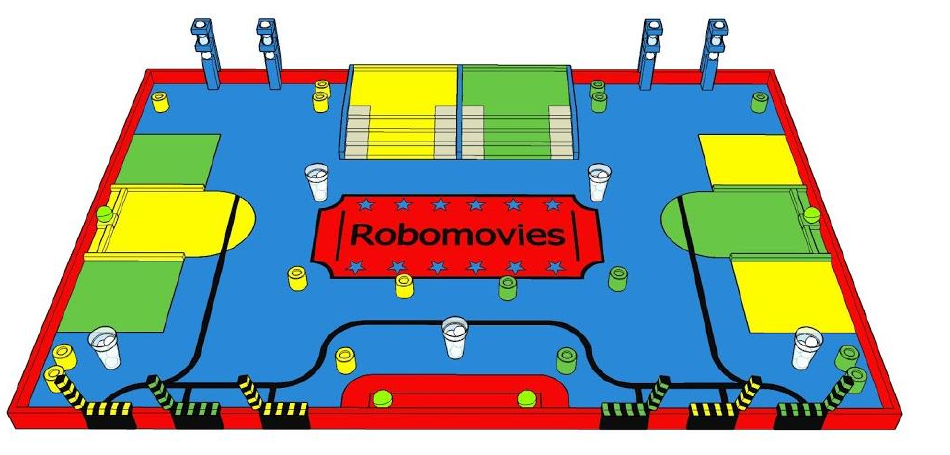
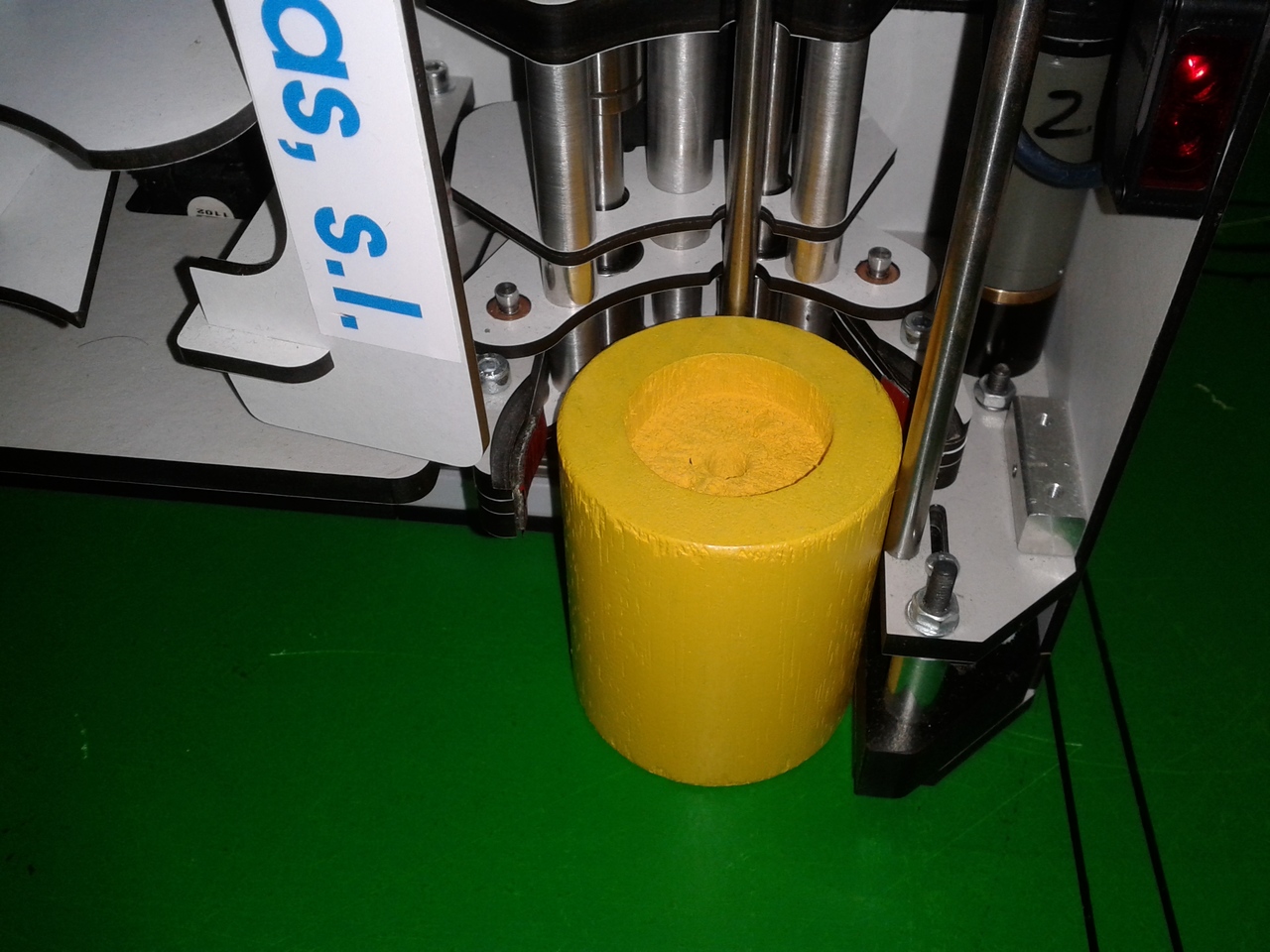
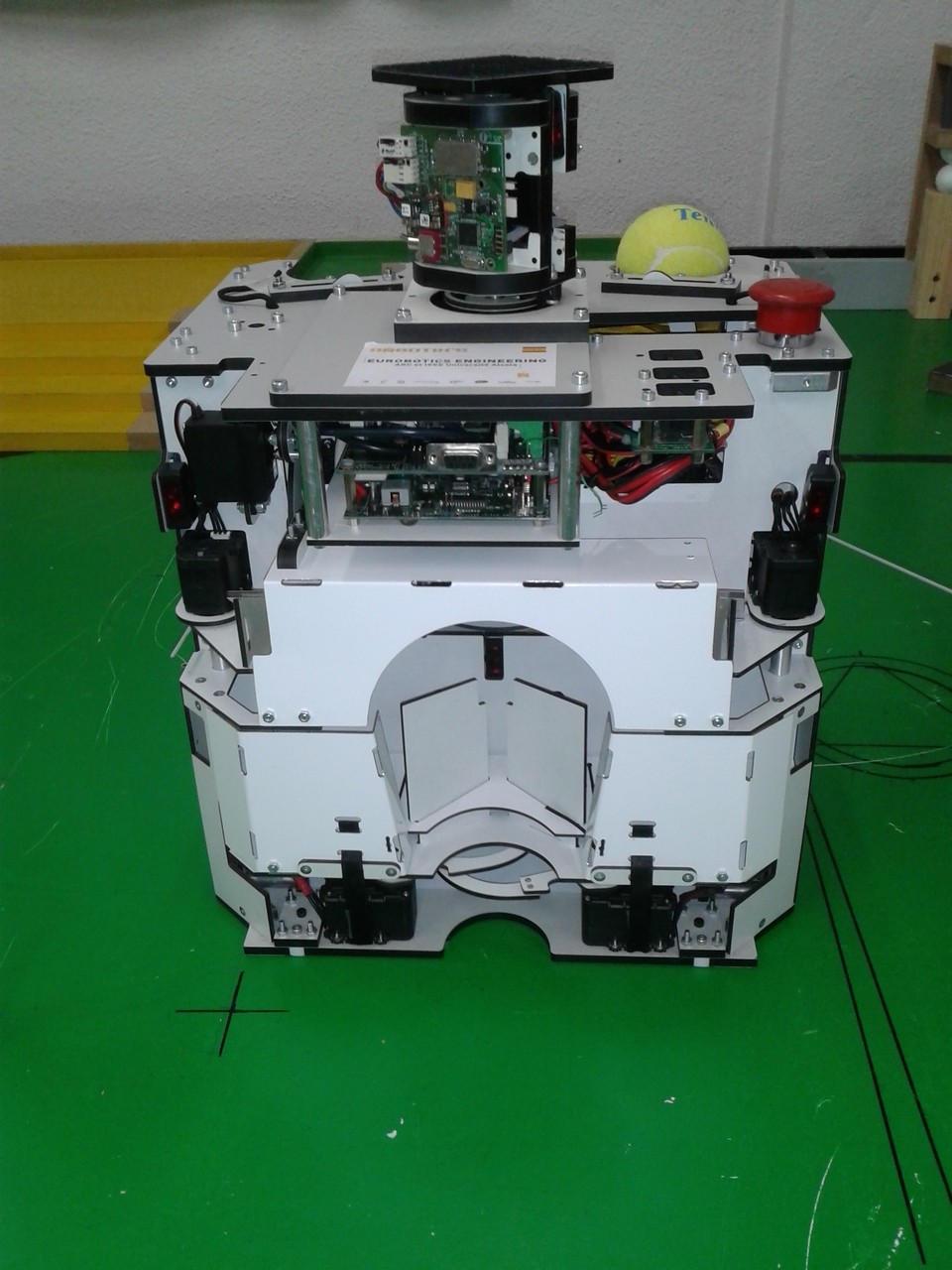
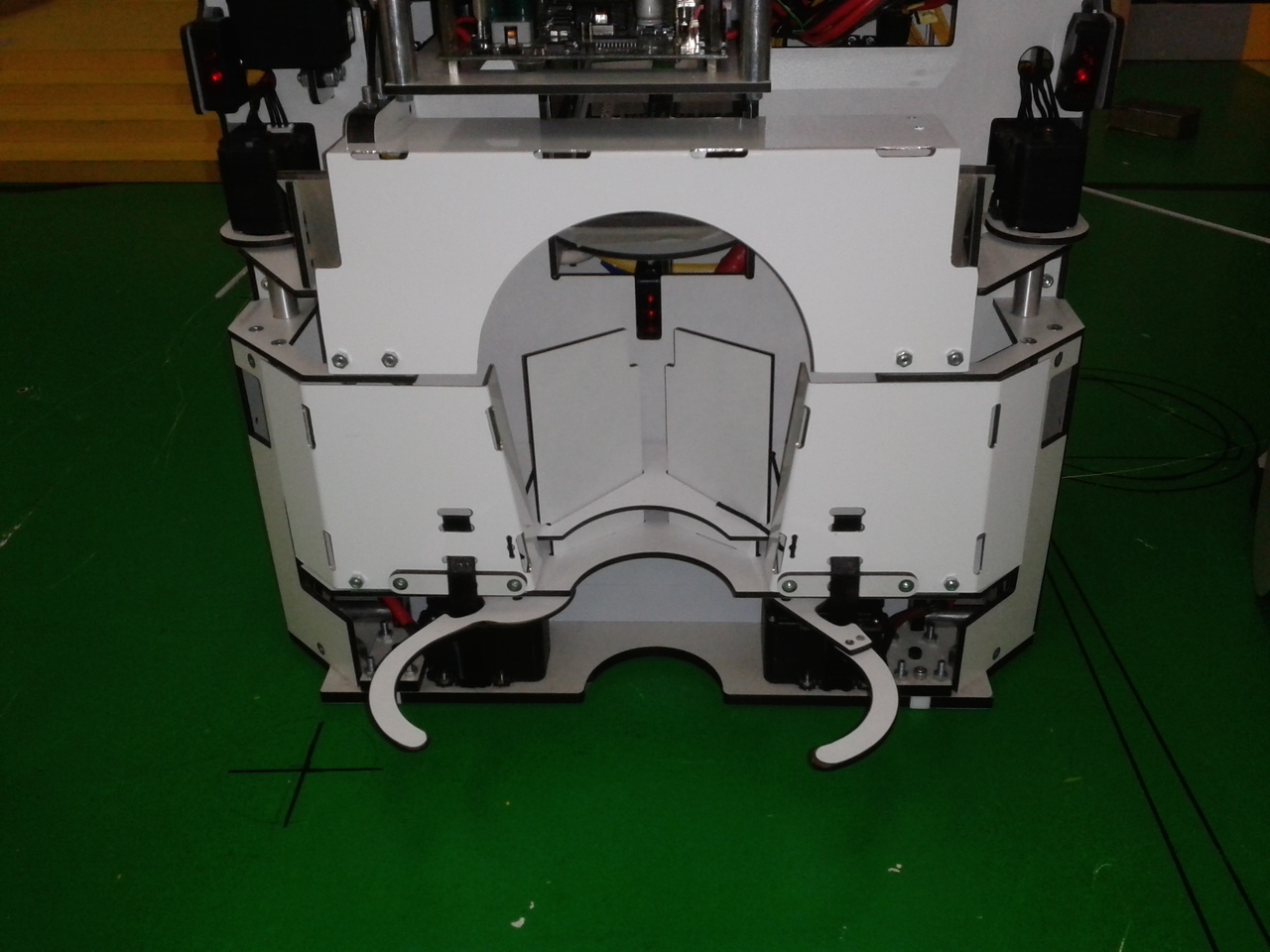
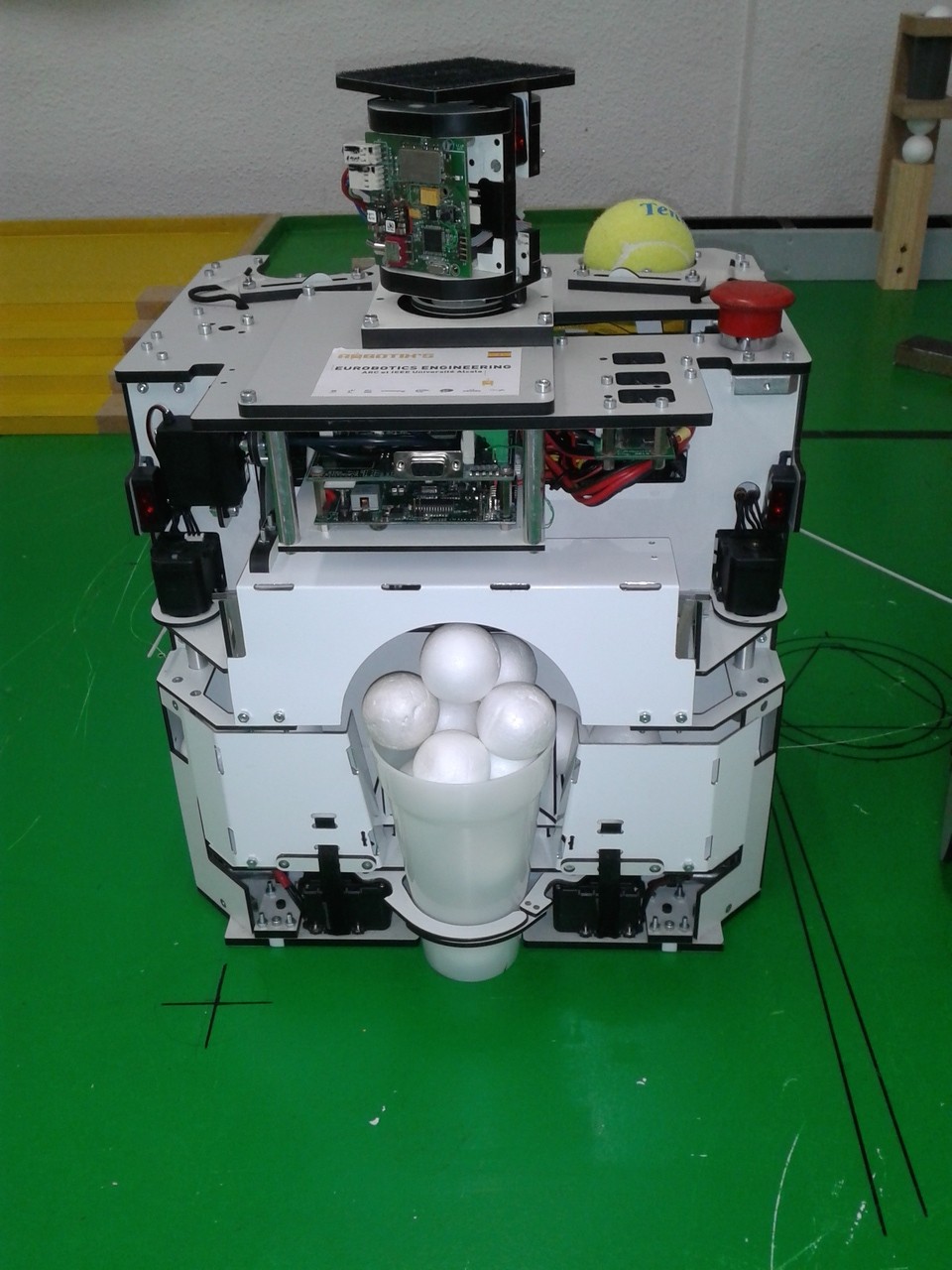
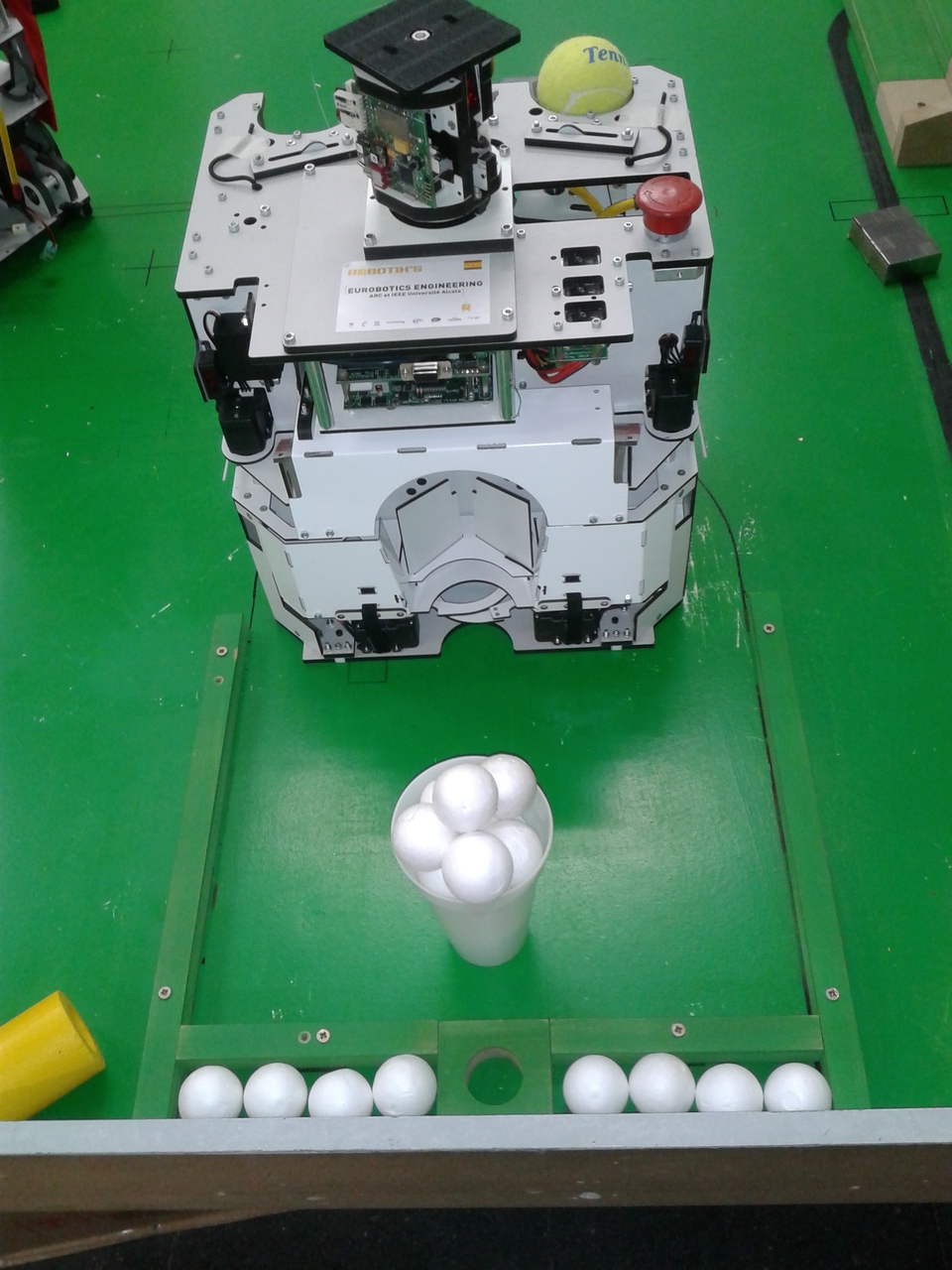
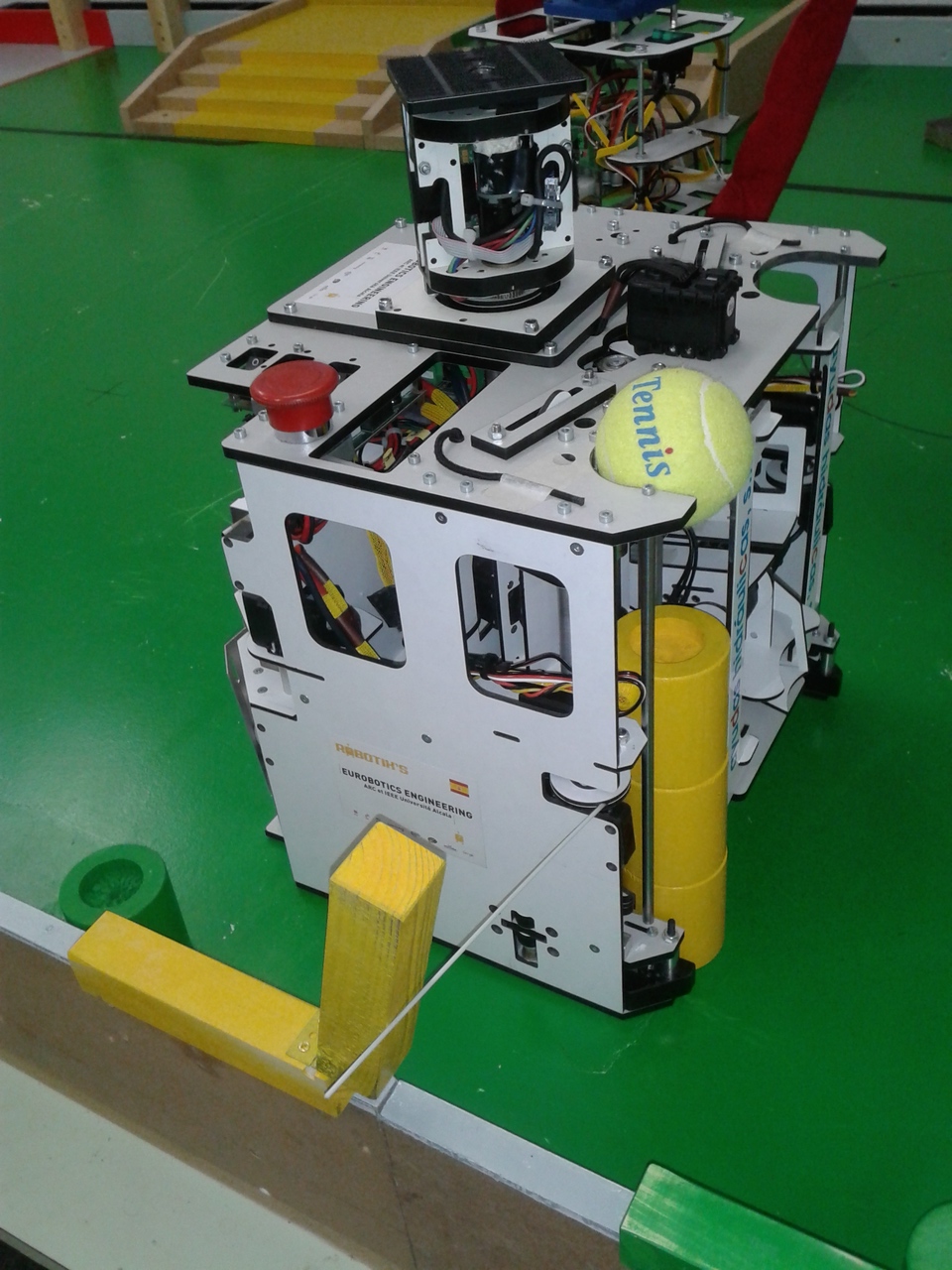
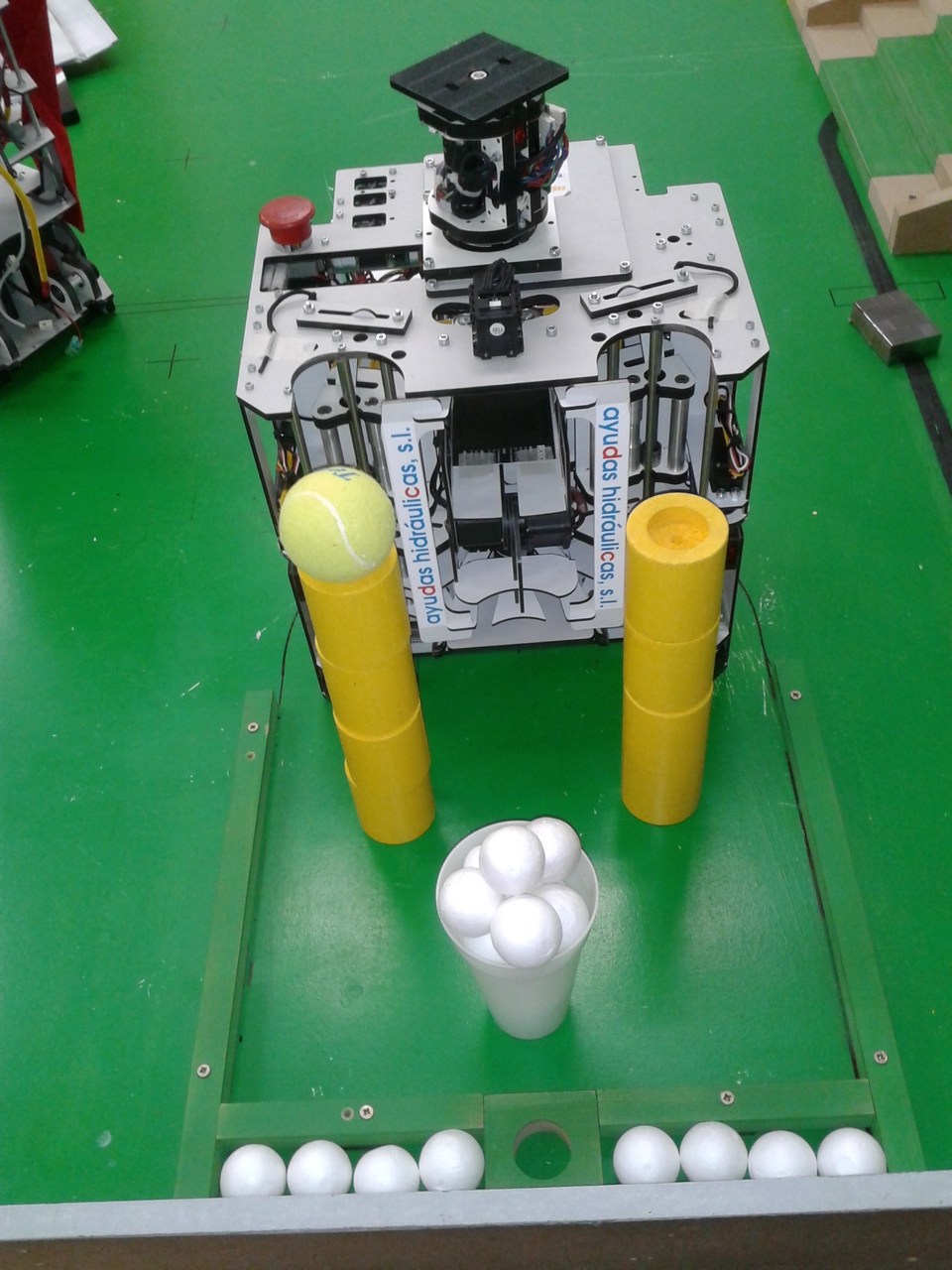
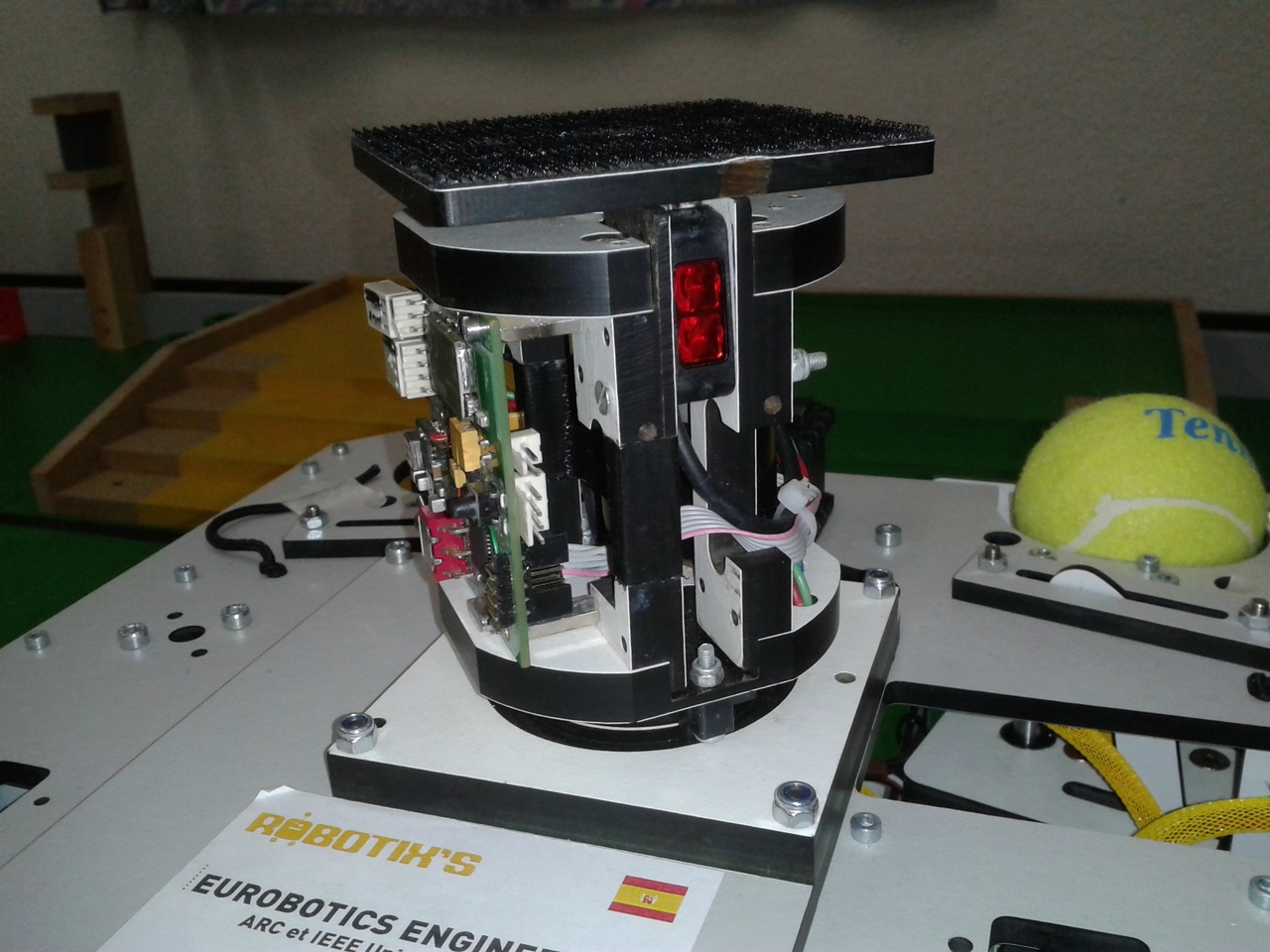
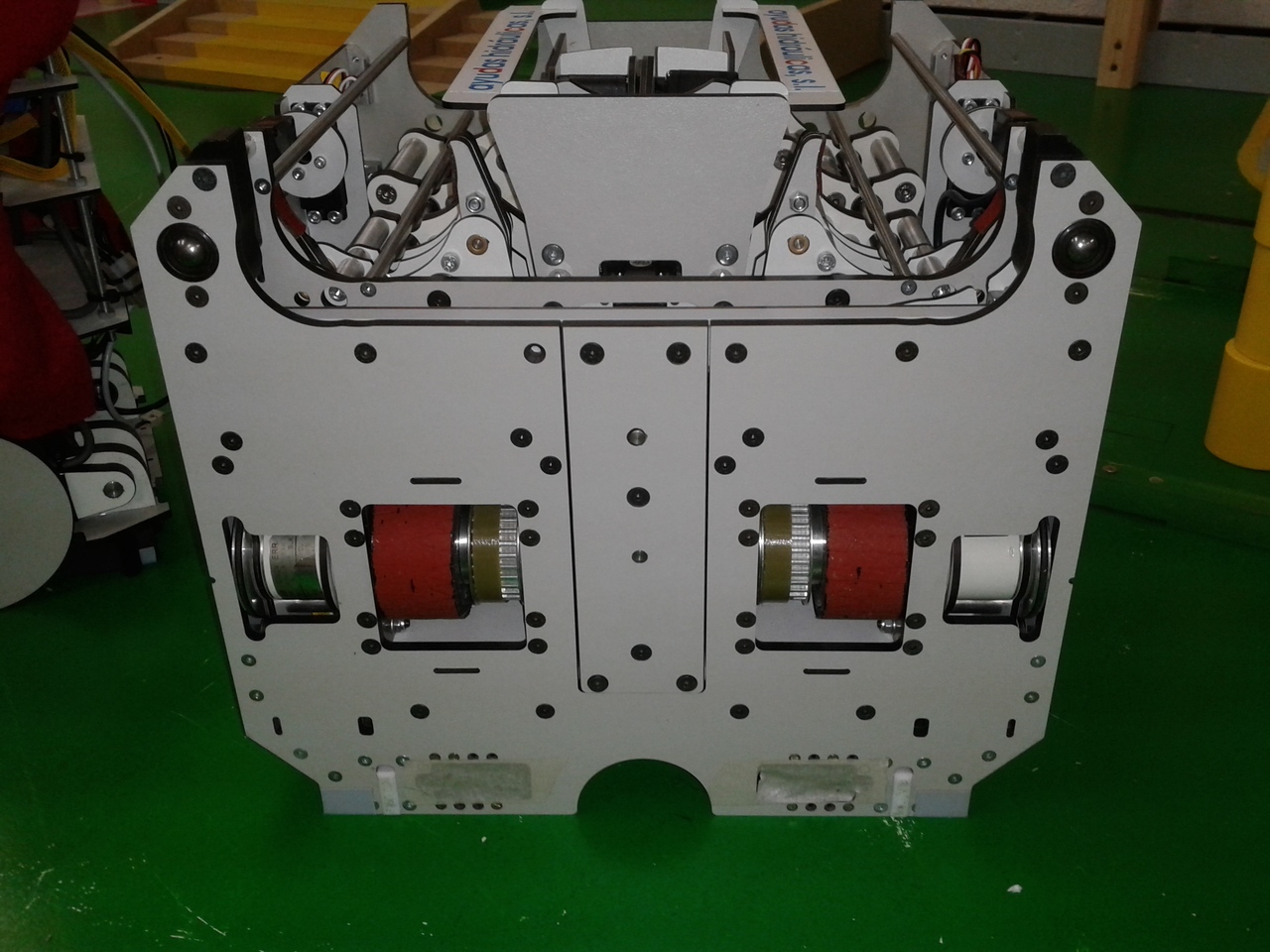
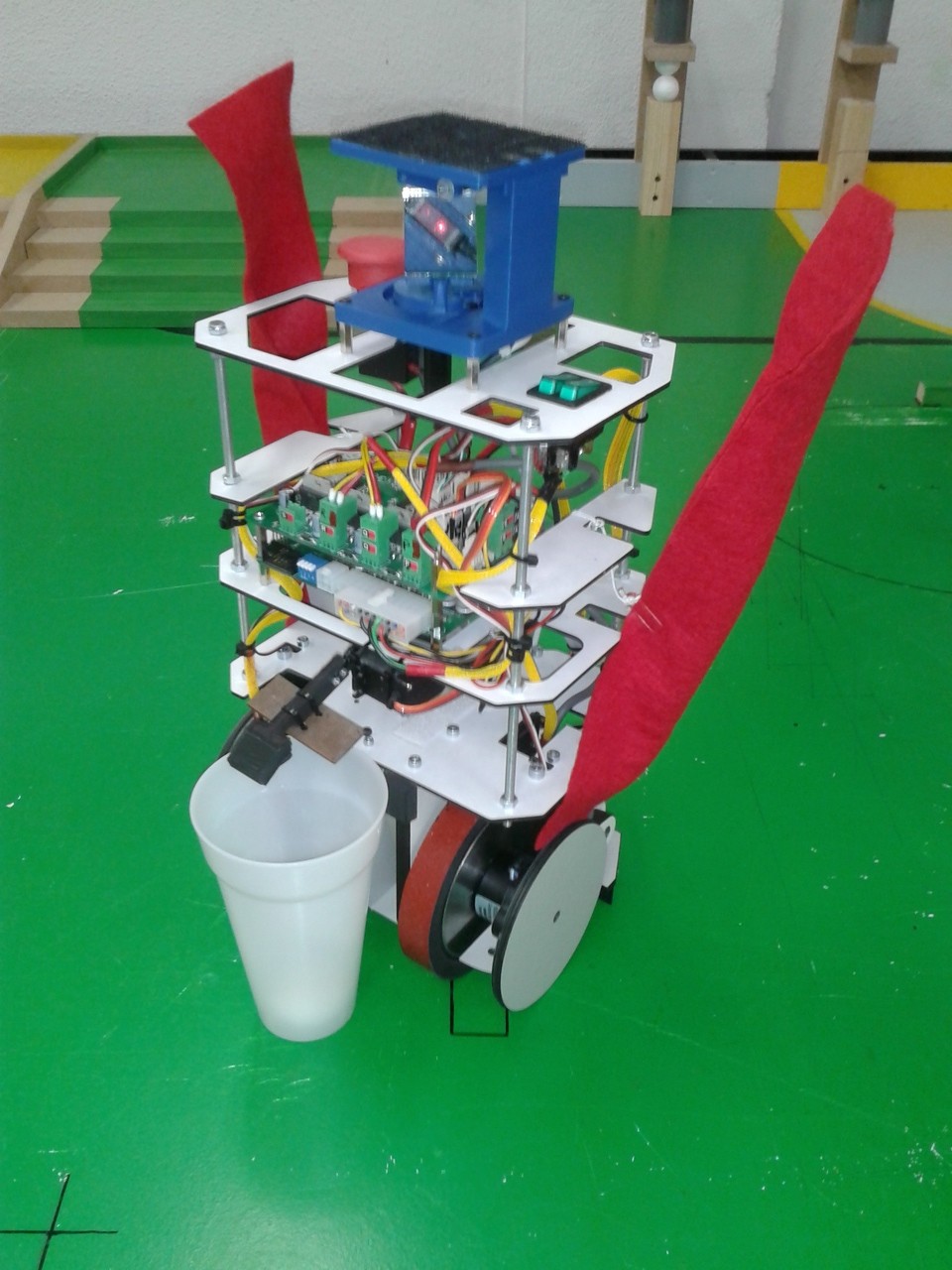
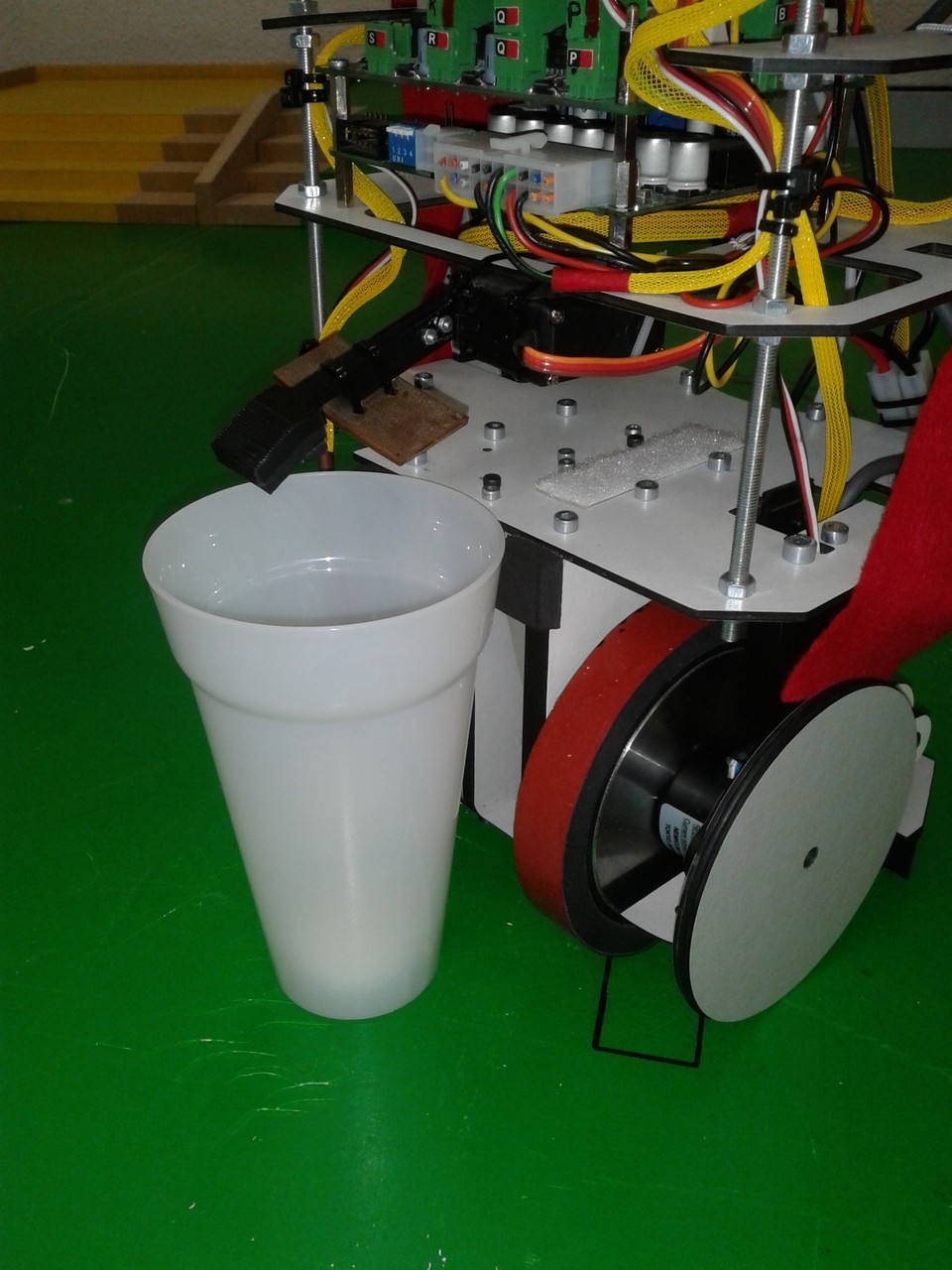
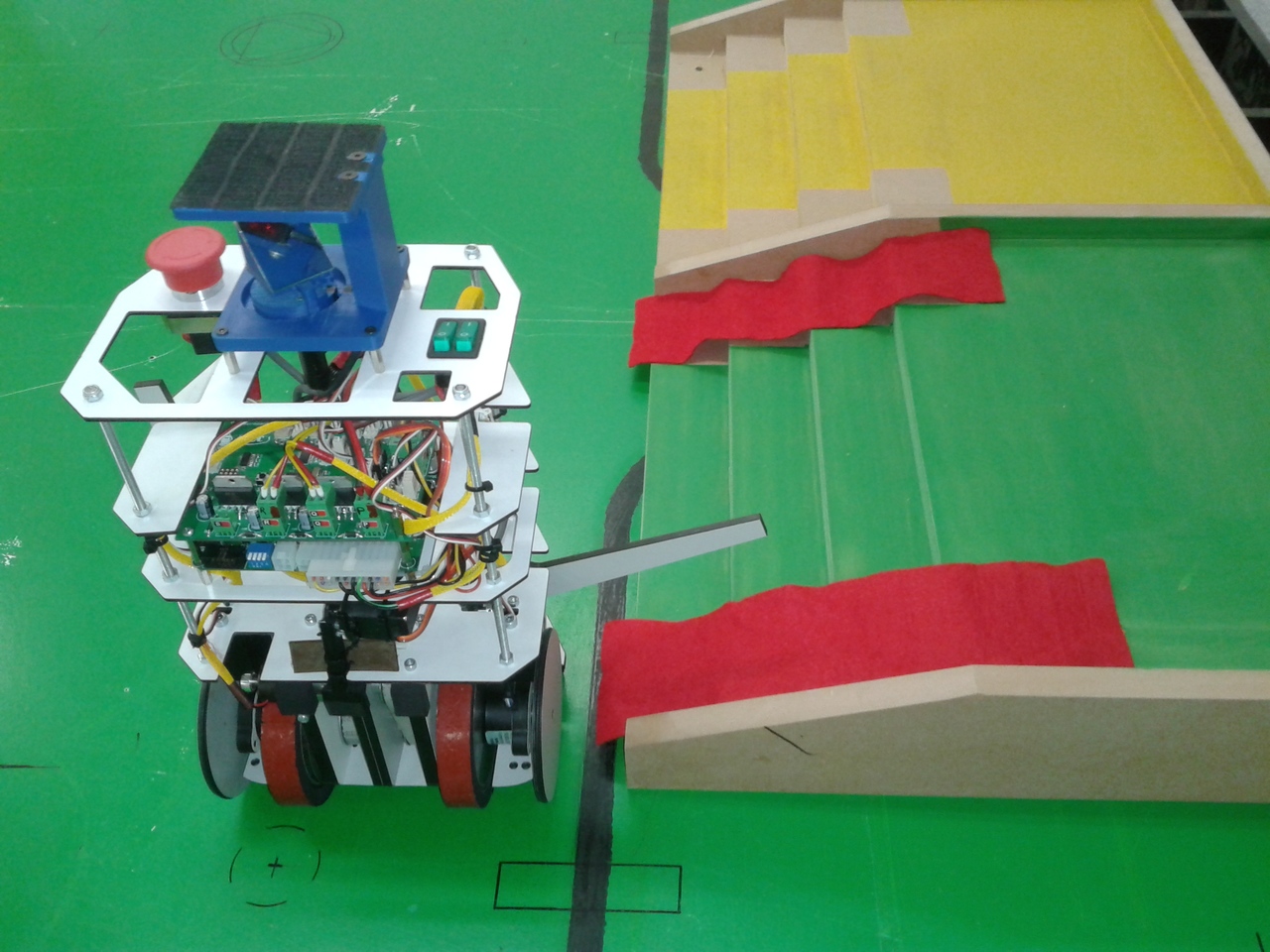
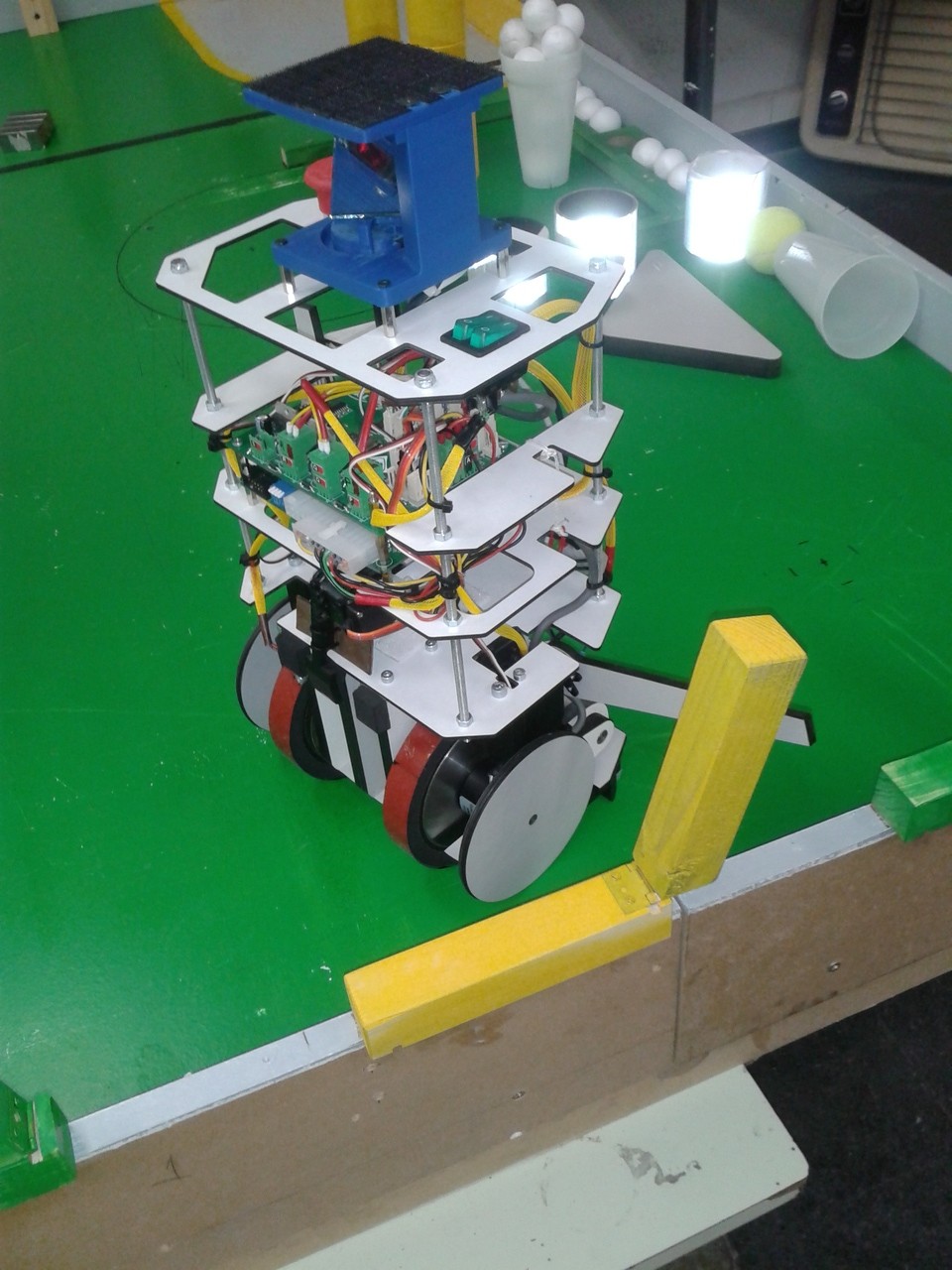
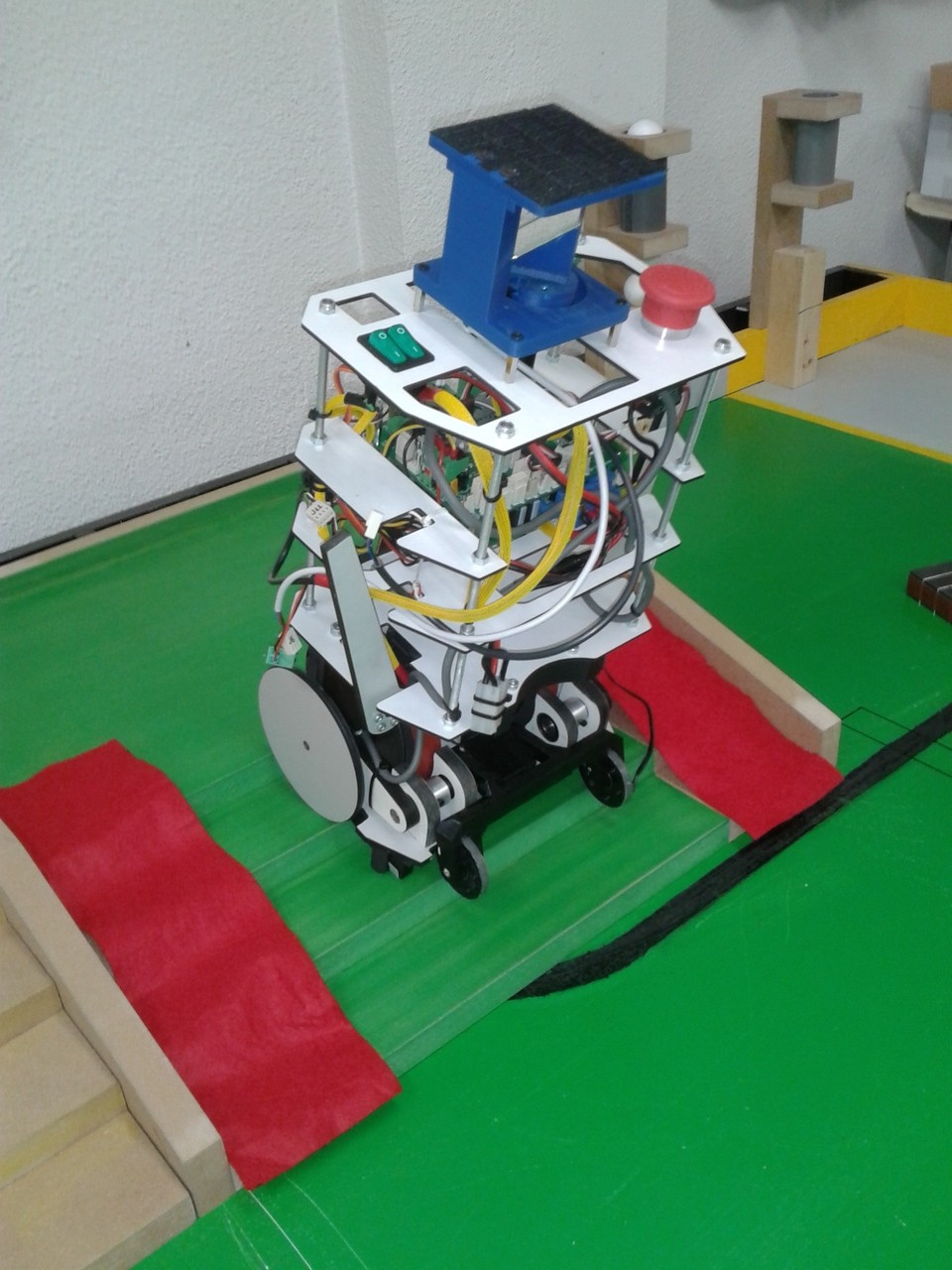
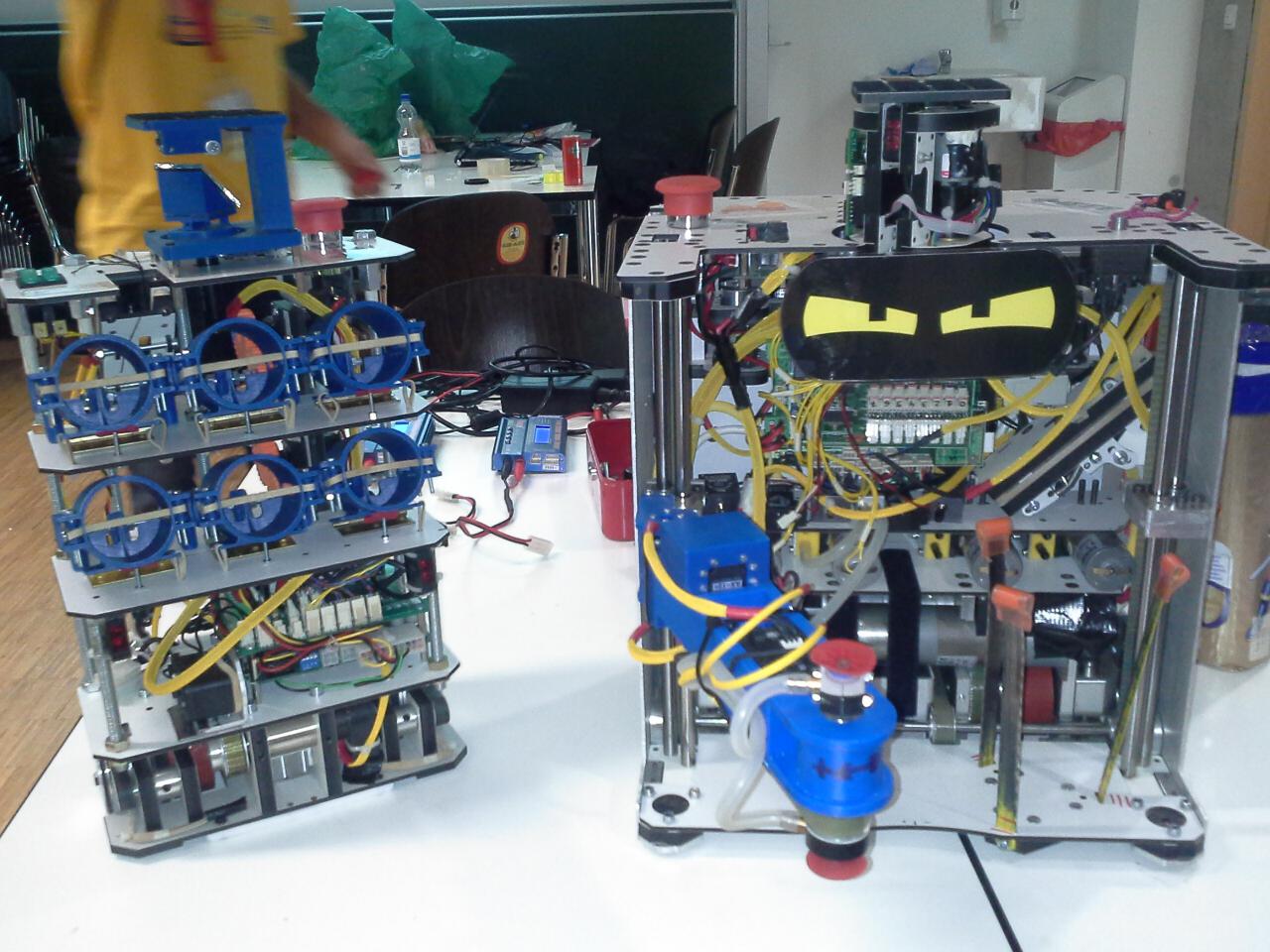
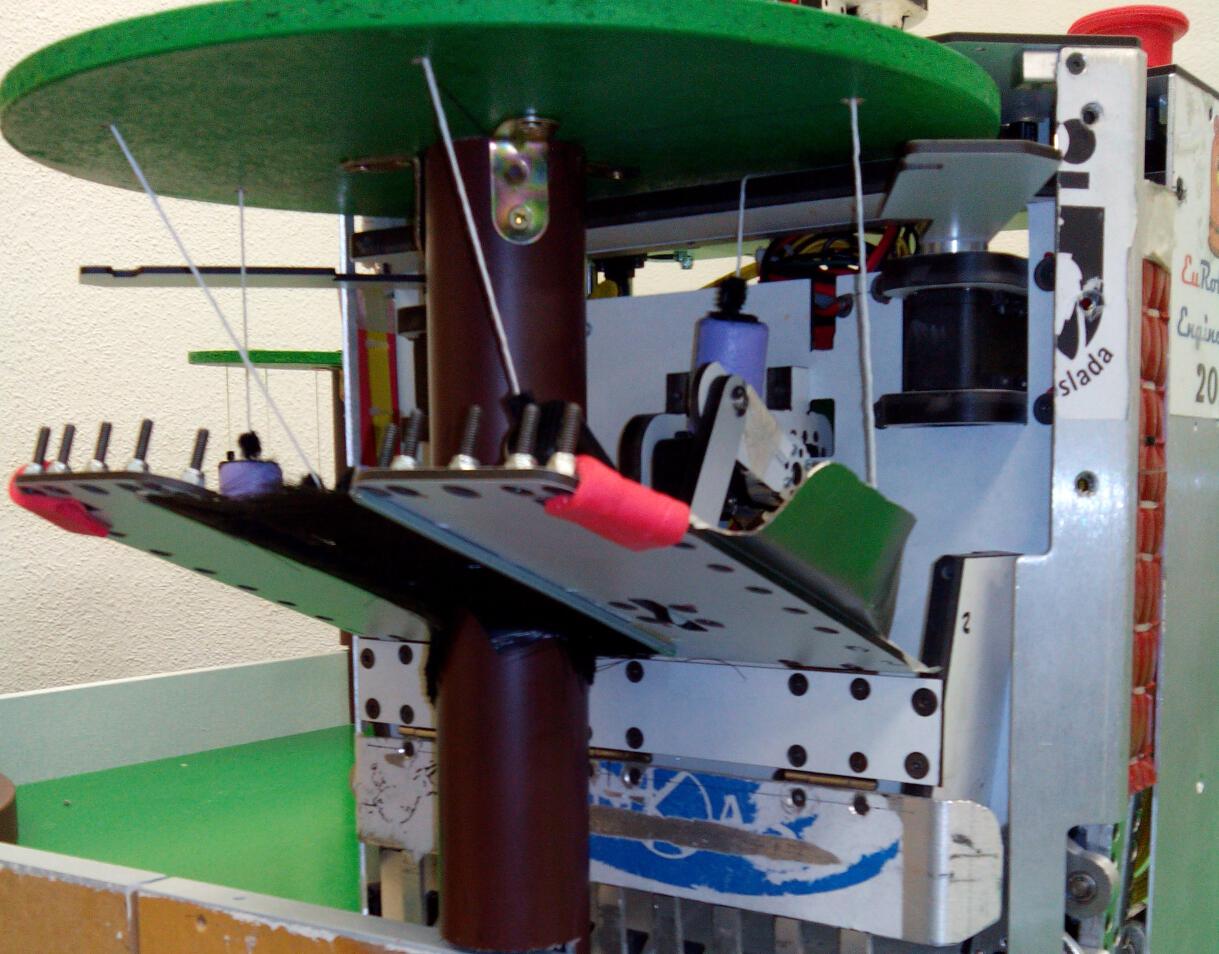
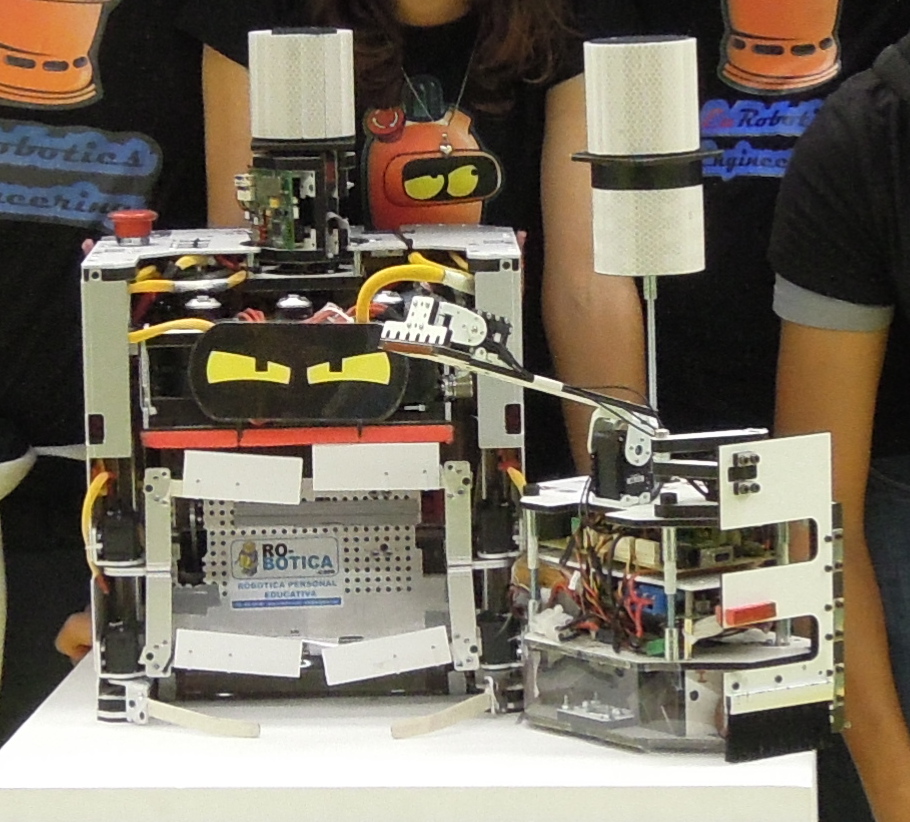
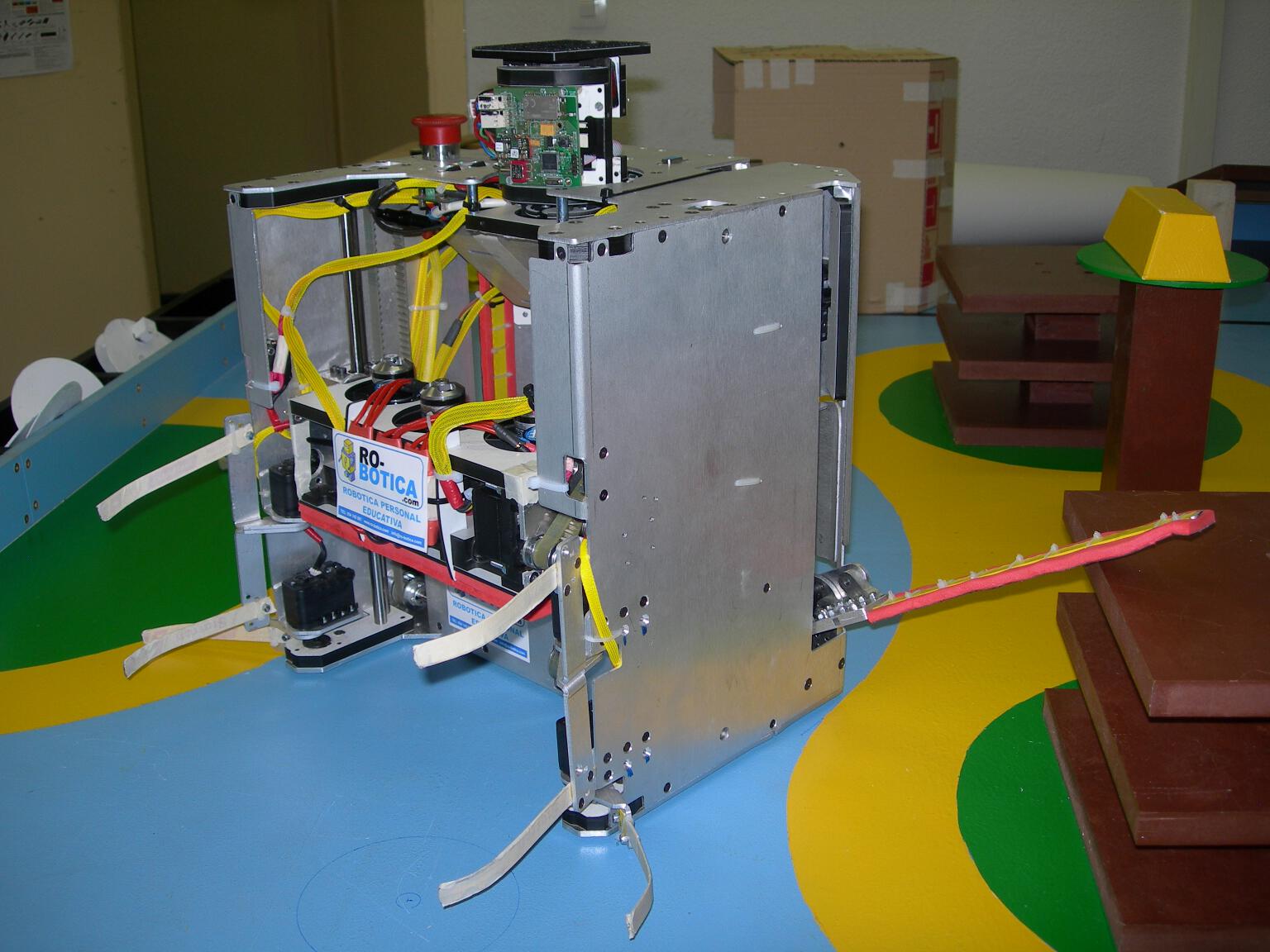
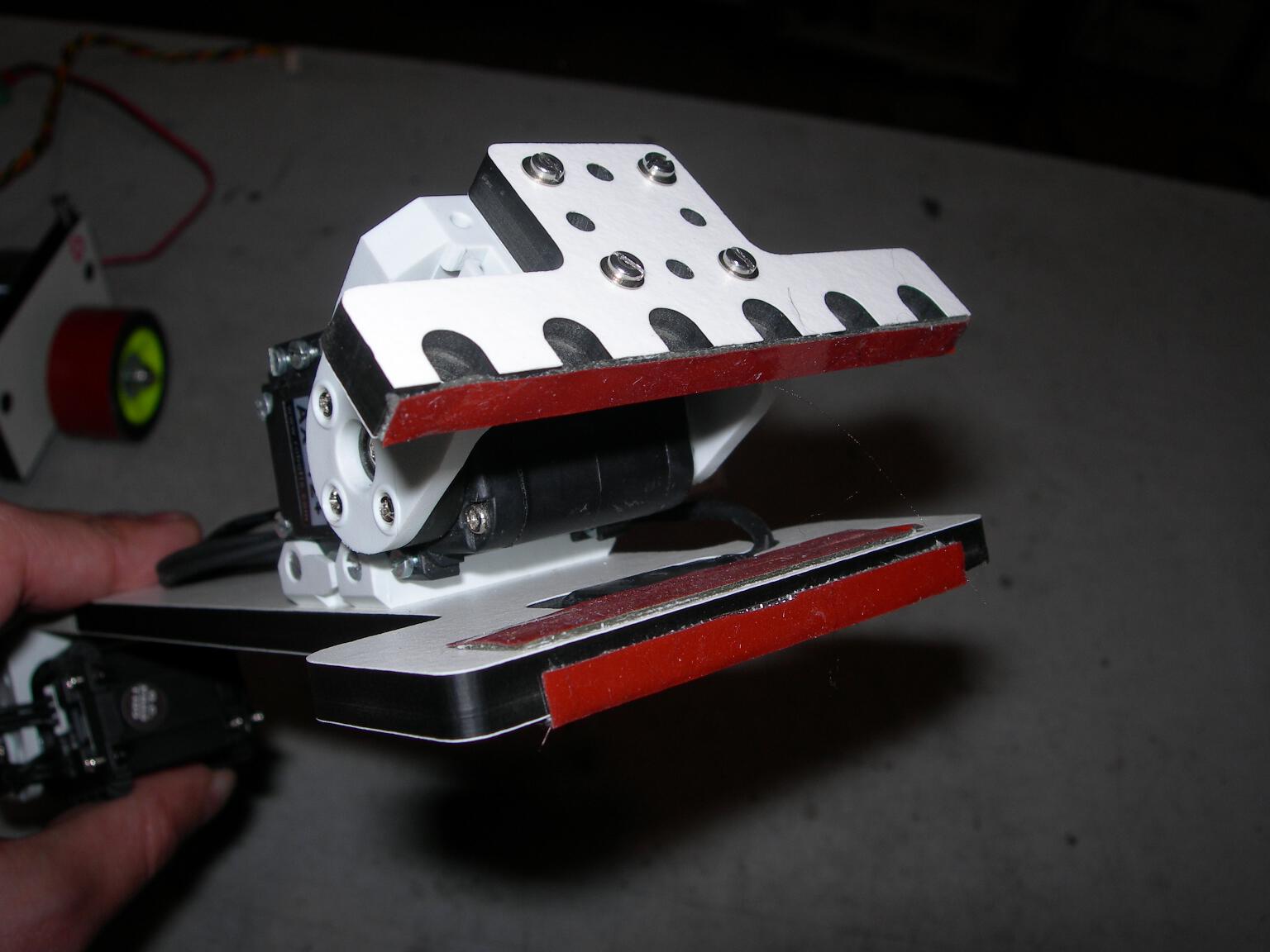
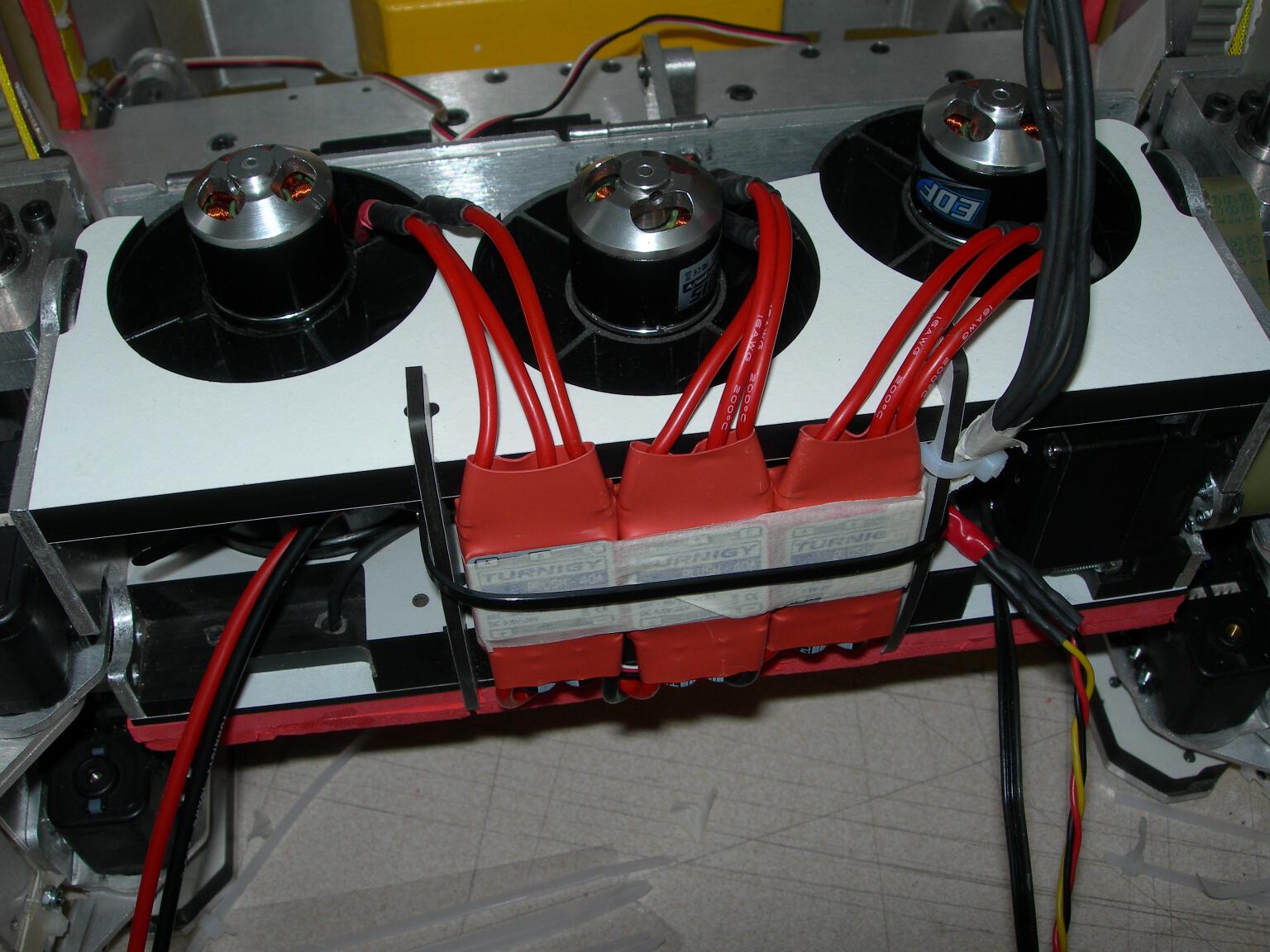
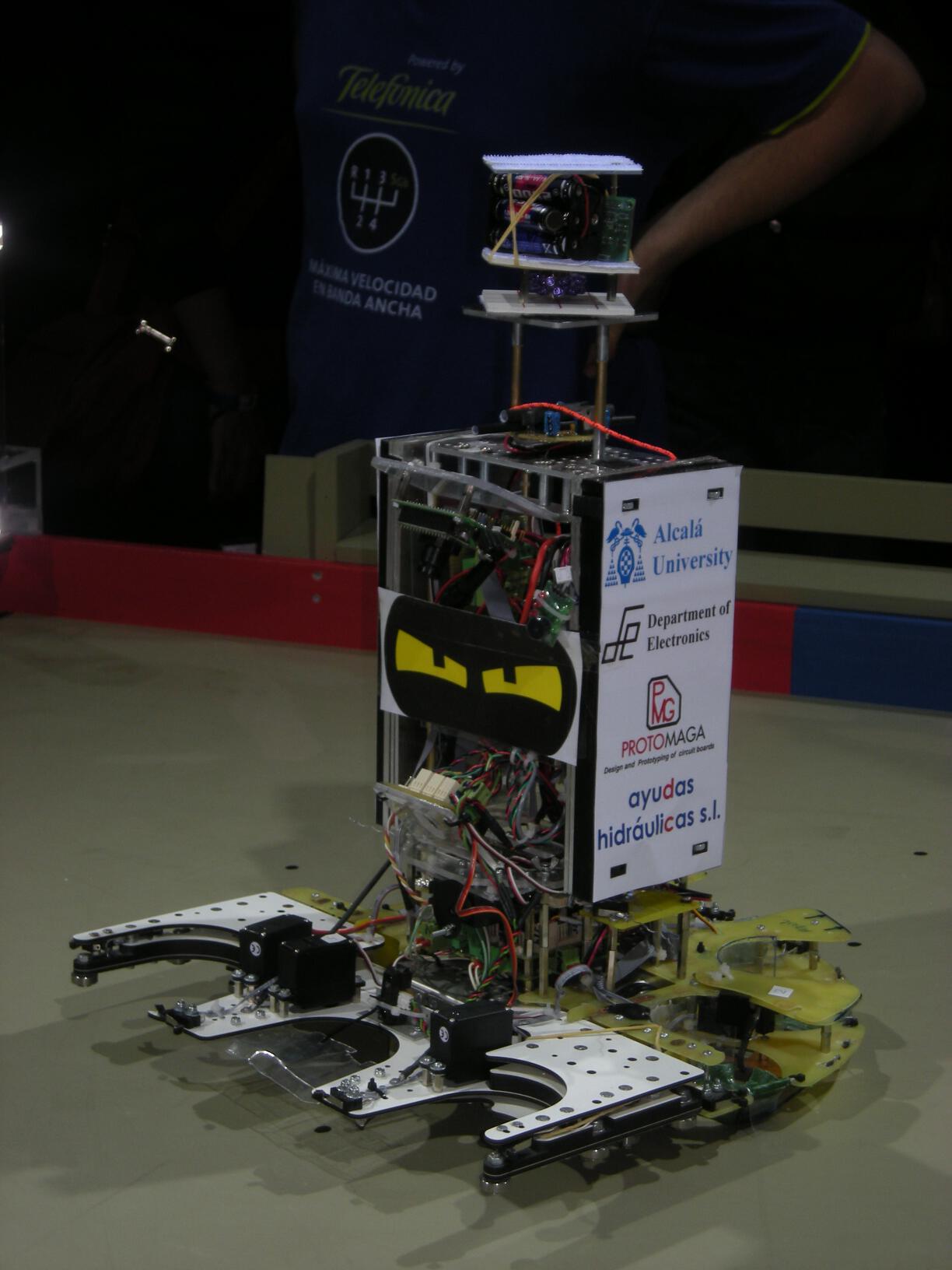
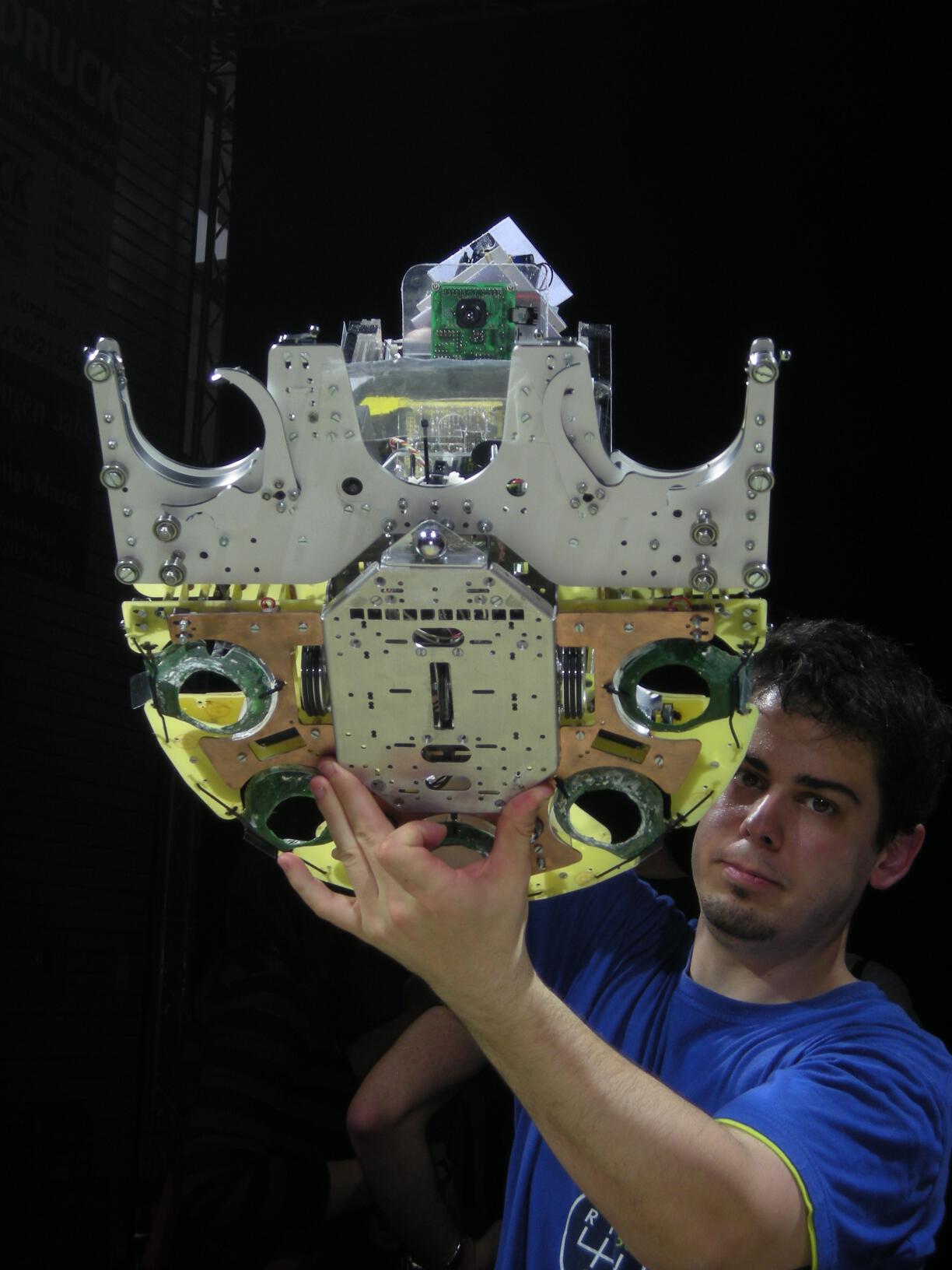
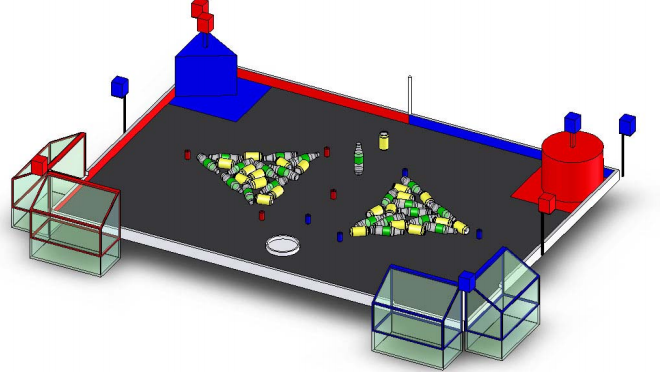
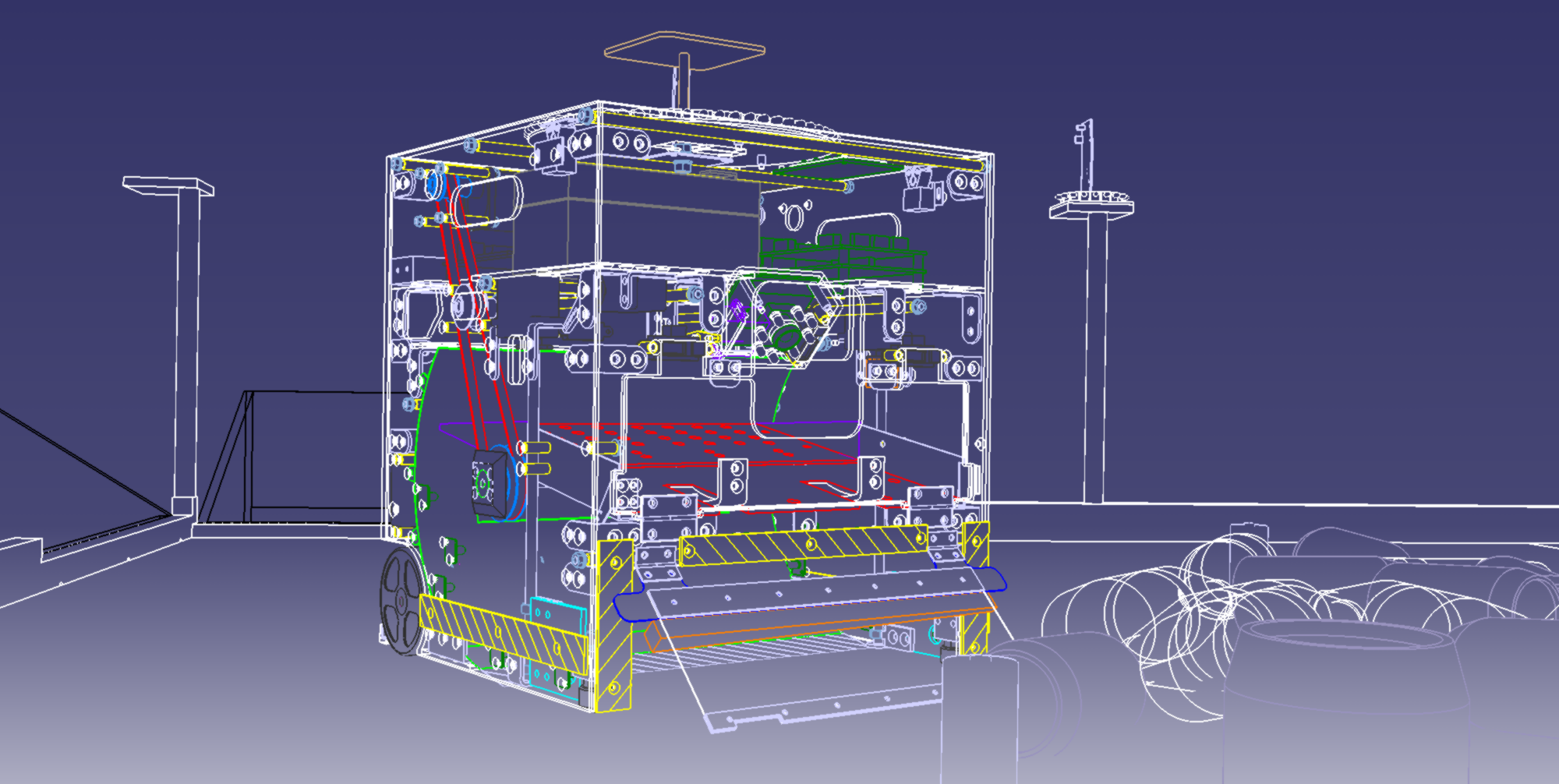
En Eurobot 2015 los robots tuvieron que ir a trabajar al cine: llenar vasos con las palomitas de las maquinas de palomitas y llevarlos a los cines, construir los focos que iluminan las escenas, cerrar las claquetas al principio de cada escena y desplegar las alfombras rojas y pasearse entre ellas.
Este año además de clasificarnos para las finales de Eurobot en Iverdon-les-Bains también participamos en las copas nacionales de Bélgica y Alemania. Durante el mes que coincidieron las copas de España, Bélgica y Alemania los robots avanzaron a pasos agigantados y vivimos muchas aventuras.
En el siguiente pase de imágenes puedes ver detalles de nuestros robots P.Tinto y Tirantes y a continuación una recopilación de vídeos de cada competición.











2014
Eurobot 2014 – Robots Grosnik y Seskäpa
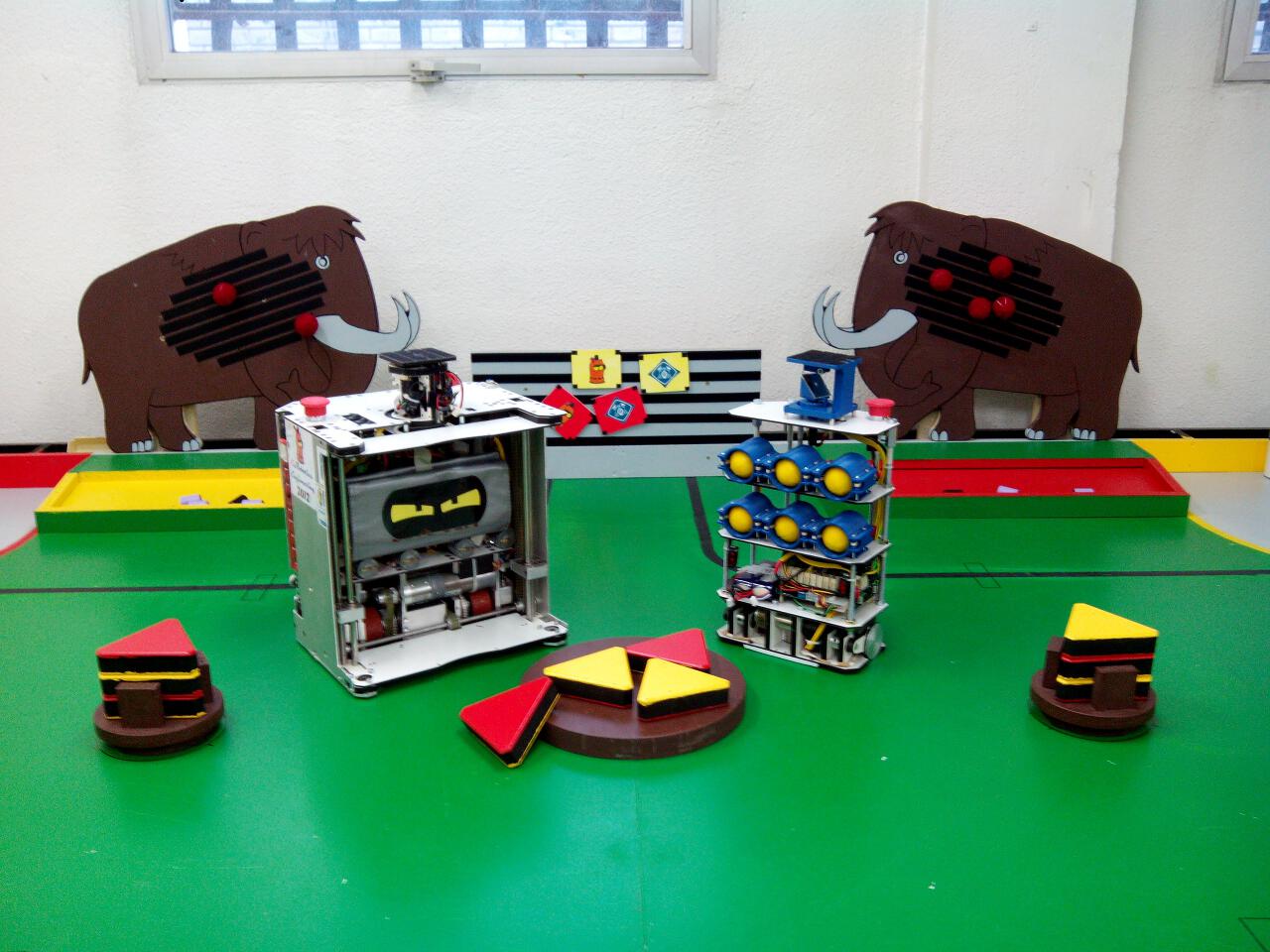
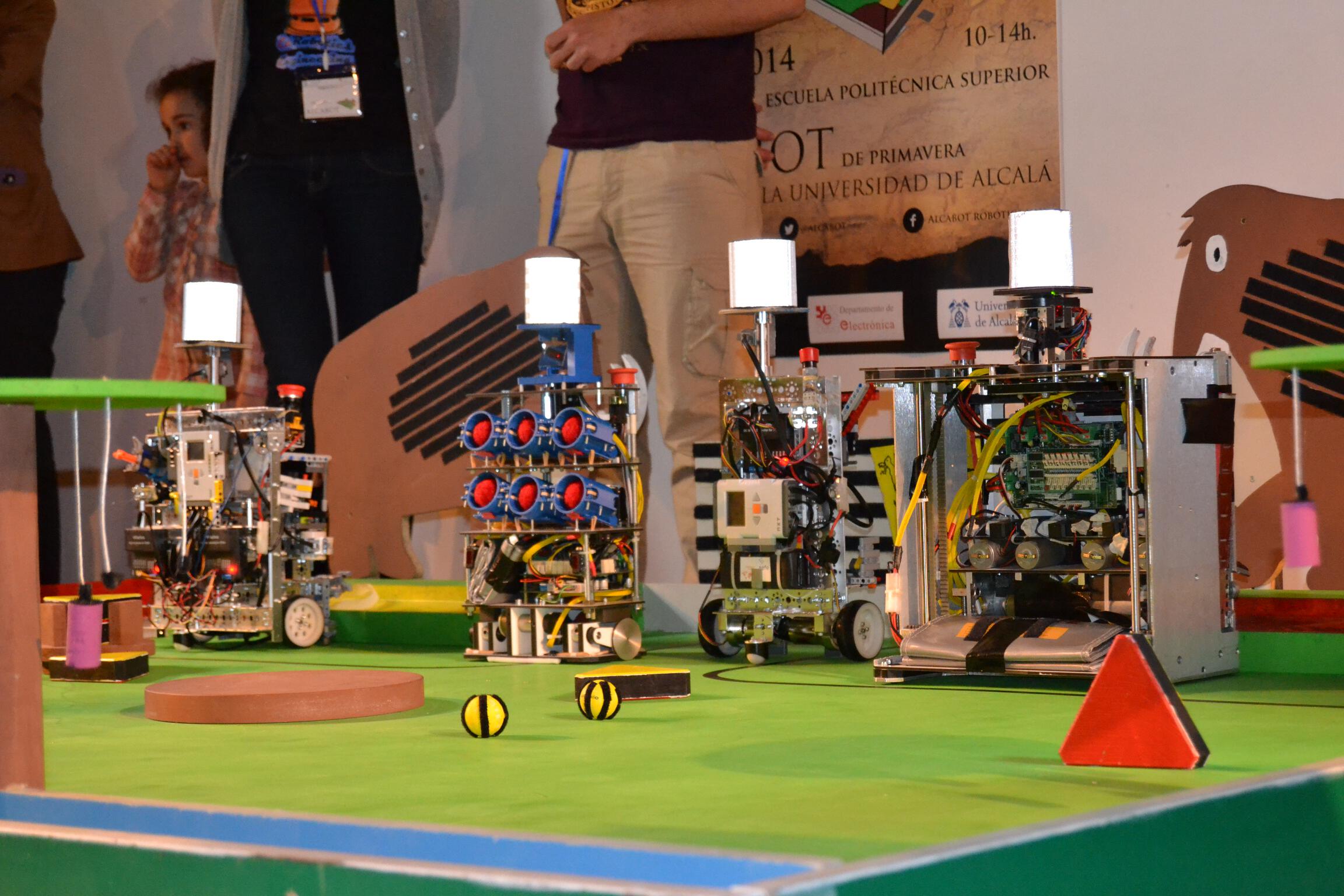
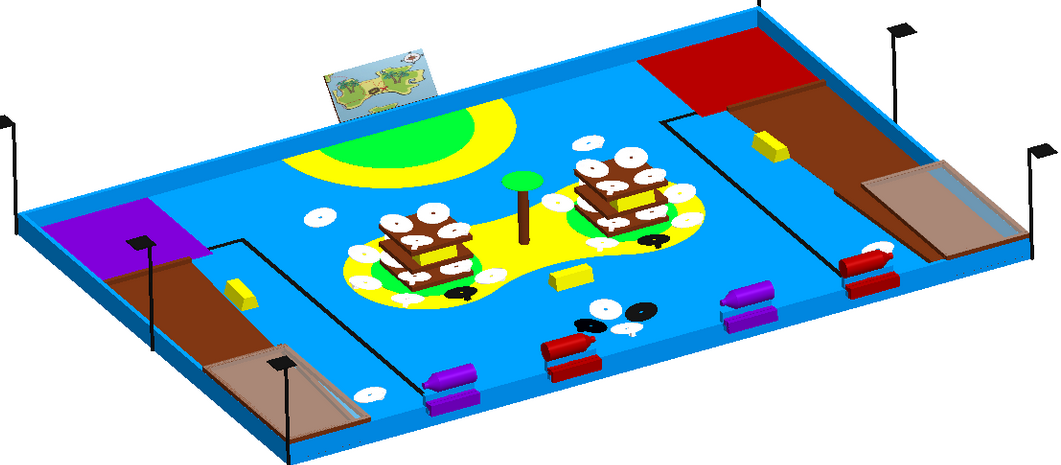
En el año 2014 los robots viajaron hasta la prehistoria, donde tenían que recolectar triángulos de fuego, cazar mamuts disparando les pelotas (lanzas) y capturarlos con una red, y además pintar sobre un fresco de piedra.
Construimos dos robots, Grosnik y Seskapa. Seskapa, el más pequeño, era el encargado de disparar al mamut, cazarlo con la red y pintar sobre el fresco. Grosnik, con su brazo, recolectaba el fuego, lo almacenaba y creaba hogueras.

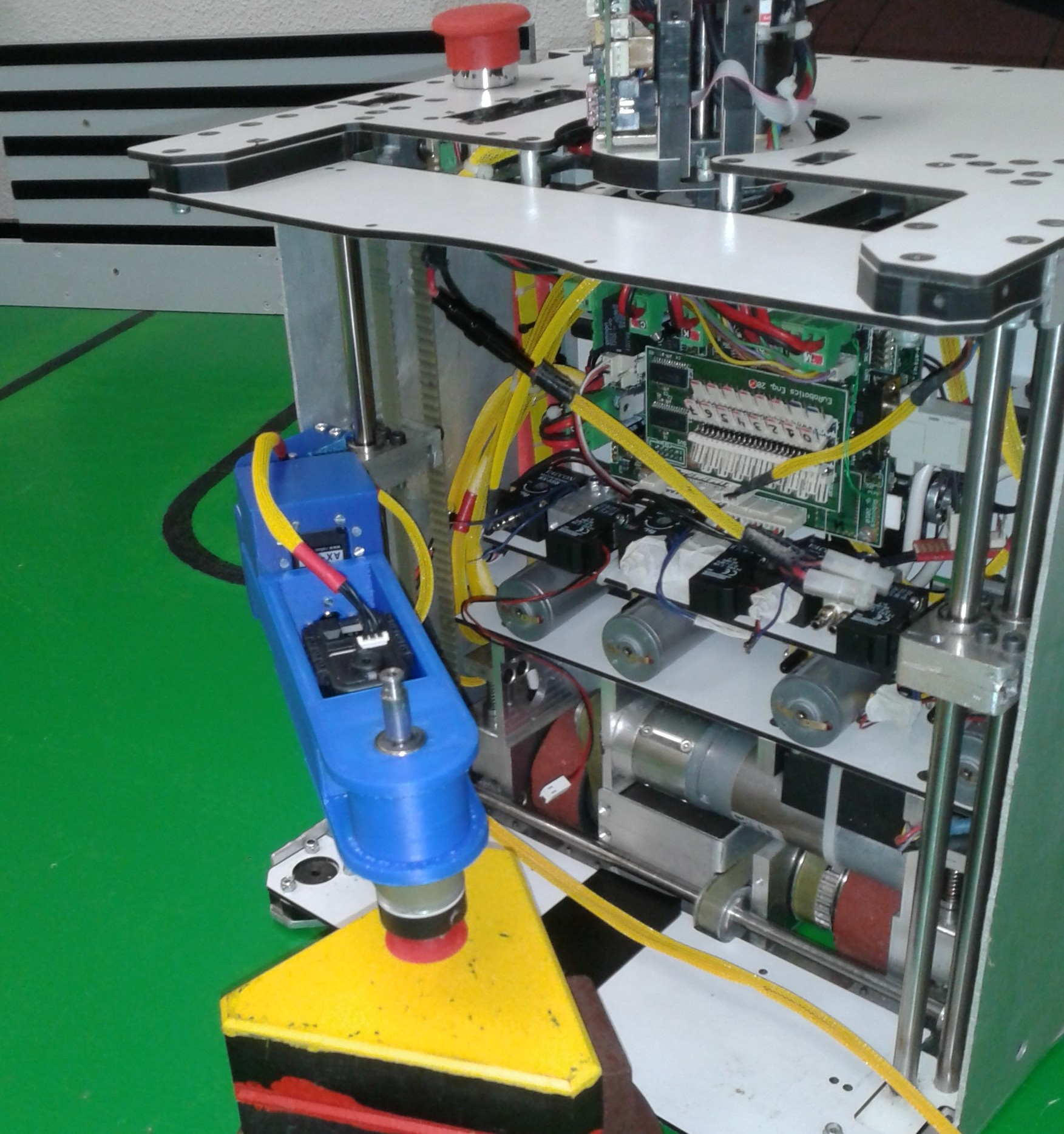







Este año evolucionamos tecnológicamente al desarrollar nueva electrónica, aprendimos a fabricar elementos mecánicos utilizando impresoras 3D, desarrollamos un sistema de comunicación por Bluetooth entre ambos robots y un simulador basado en el simulador del equipo Microb. Gracias este simulador dos de los integrantes del equipo pudieron programar la estrategia del robot desde Alemania mientras el resto de los integrantes trabajaban en los robots desde España.
Grosnik y Seskapa consiguieron clasificarse para la finales de Eurobot en Dresden (Alemania), donde terminaron en el puesto 23 del ranking.
Click Play to watch the list of videos of our 2014 robots, including the finals in Dresden (Germany)
2012
Eurobot 2012 – Robots Crispín y Automático
En el año 2012 los robots jugaron a ser piratas que tenían que hacerse con el mayor botín posible en su barco: lingotes de oro, monedas; descubrir el mapa de un tesoro escondido y enviar mensajes en botellas.
Contruimos a Crispín y Automático. Crispín, el robot más pequeño se encargaba de descubrir el mapa del tesoro con su pinza y llevar monedas y lingotes hasta el barco con su brazo lateral.
Automático tenía un sistema de succión por aire con el que cogía y almacenaba los lingotes. Además era capaz de almacenar monedas y mandar los mensajes en botellas. Ambos robots utilizaban la tecnología que desarrollamos en el año 2010.
Nuestros robots se clasificaron parar las finales de Eurobot en La Ferté-Bernard (Francia), donde consiguieron alcanzar los cuartos de final.








Click Play to watch the list of videos of our 2012 robots, including the finals in La Ferté-Bernard (France)
2011
Eurobot 2011 – Robot Zamorano
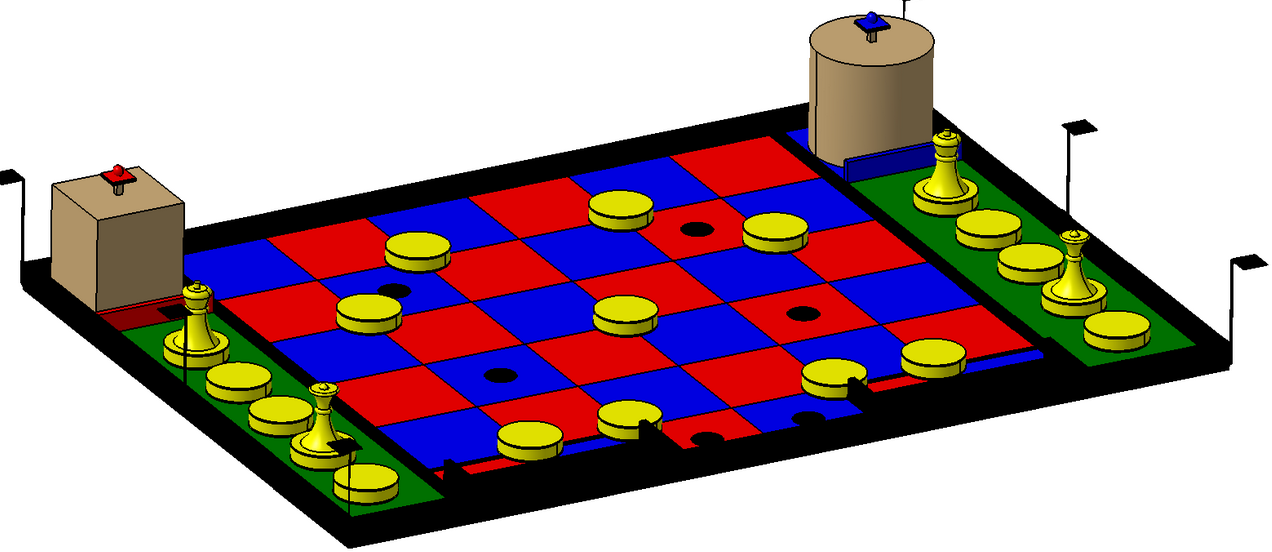
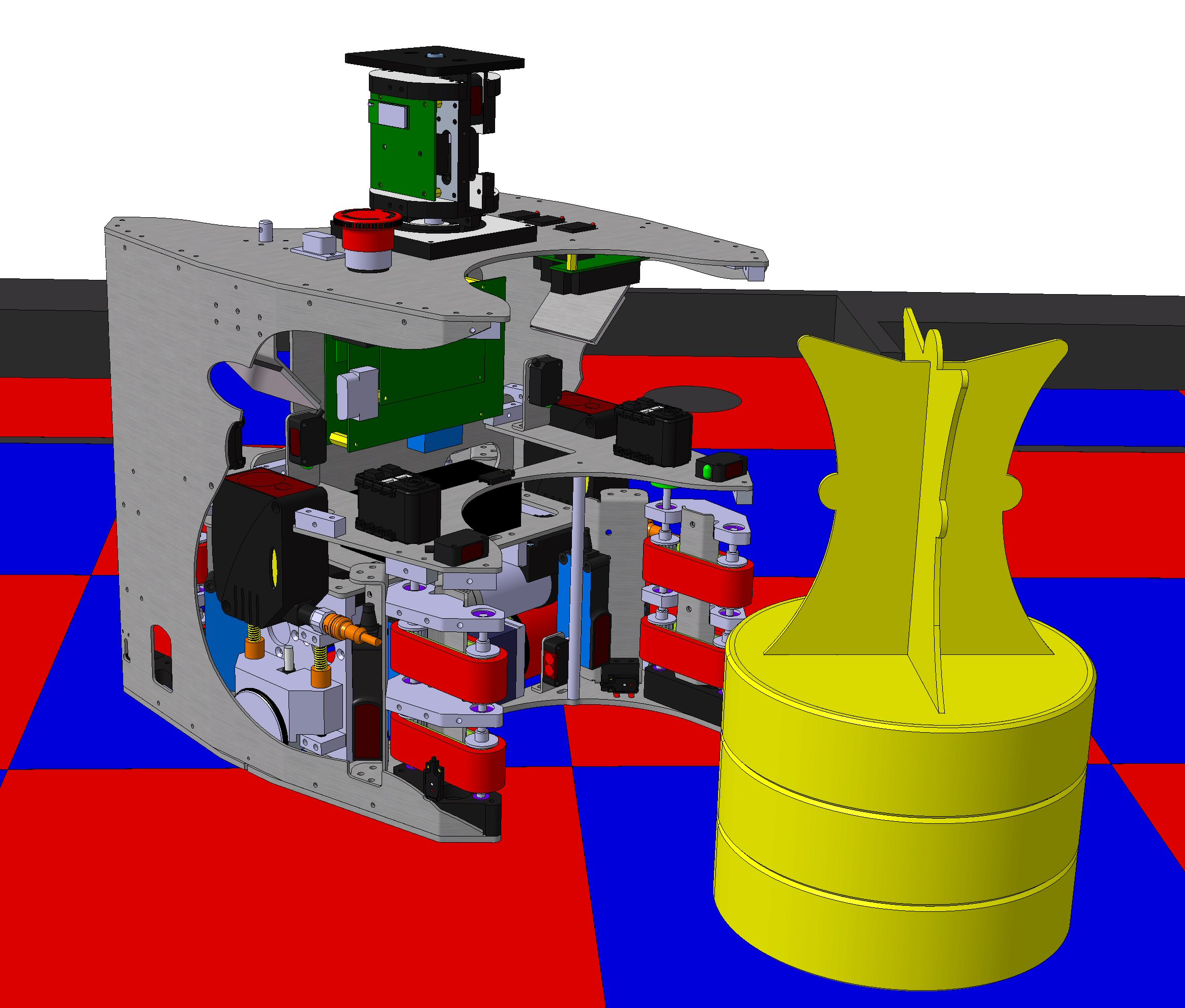
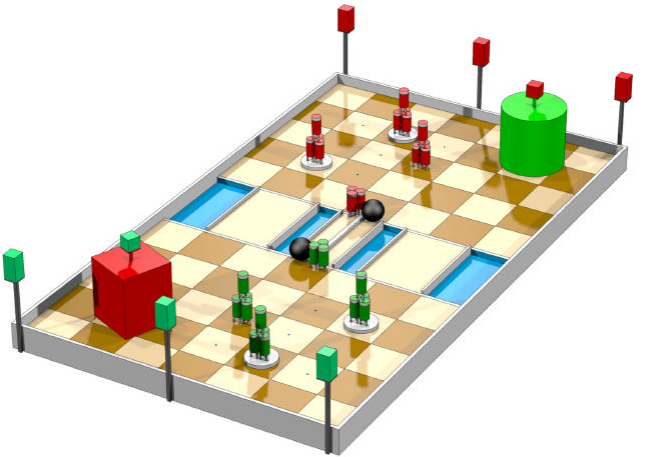
En el año 2011 los robots tuvieron que jugar al Ajedrez, el robot que más peones tuviese sobre las casillas de su color ganaba. Además, torres de dos peones y una reina o rey daban una puntuación extra.
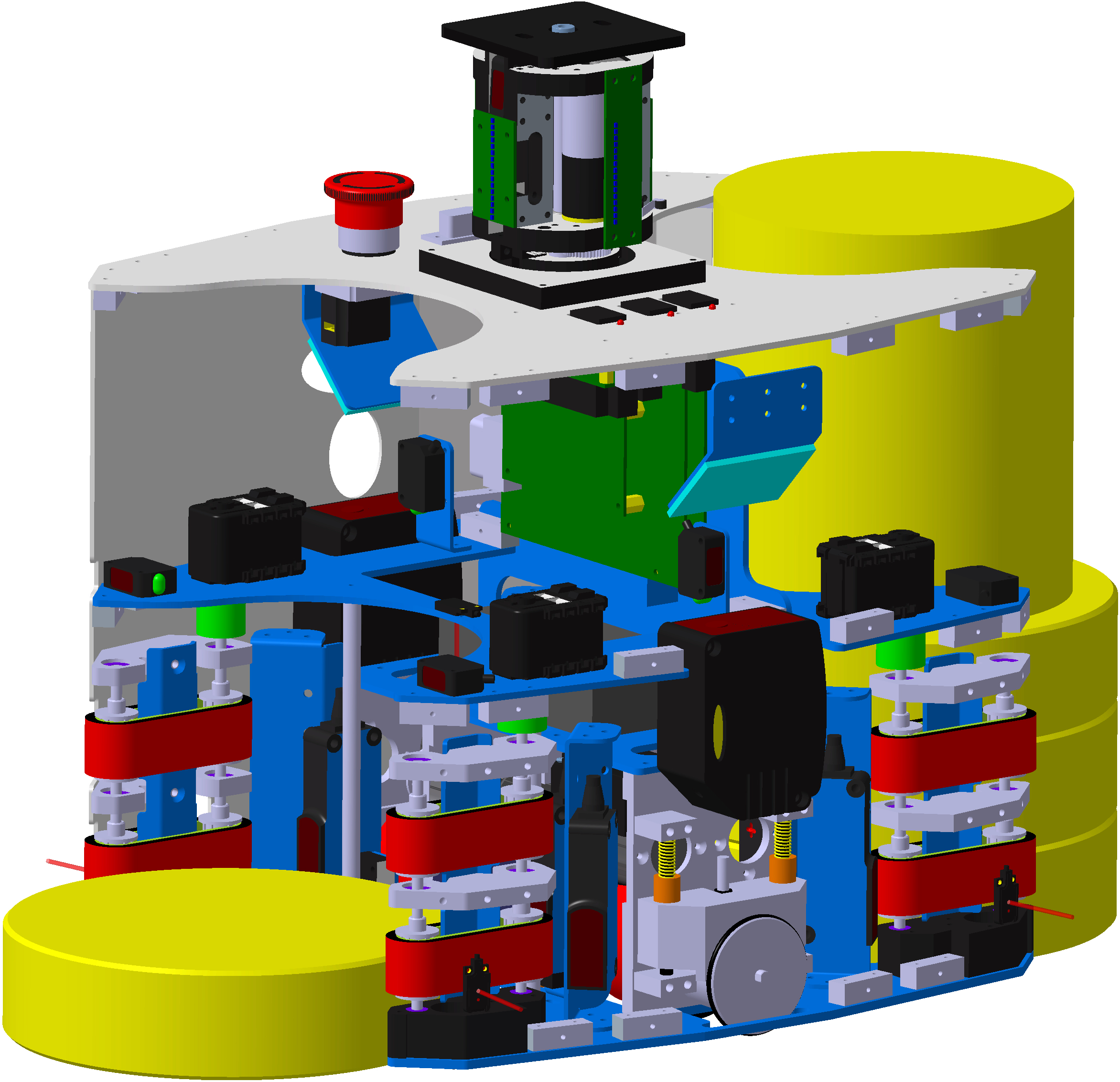
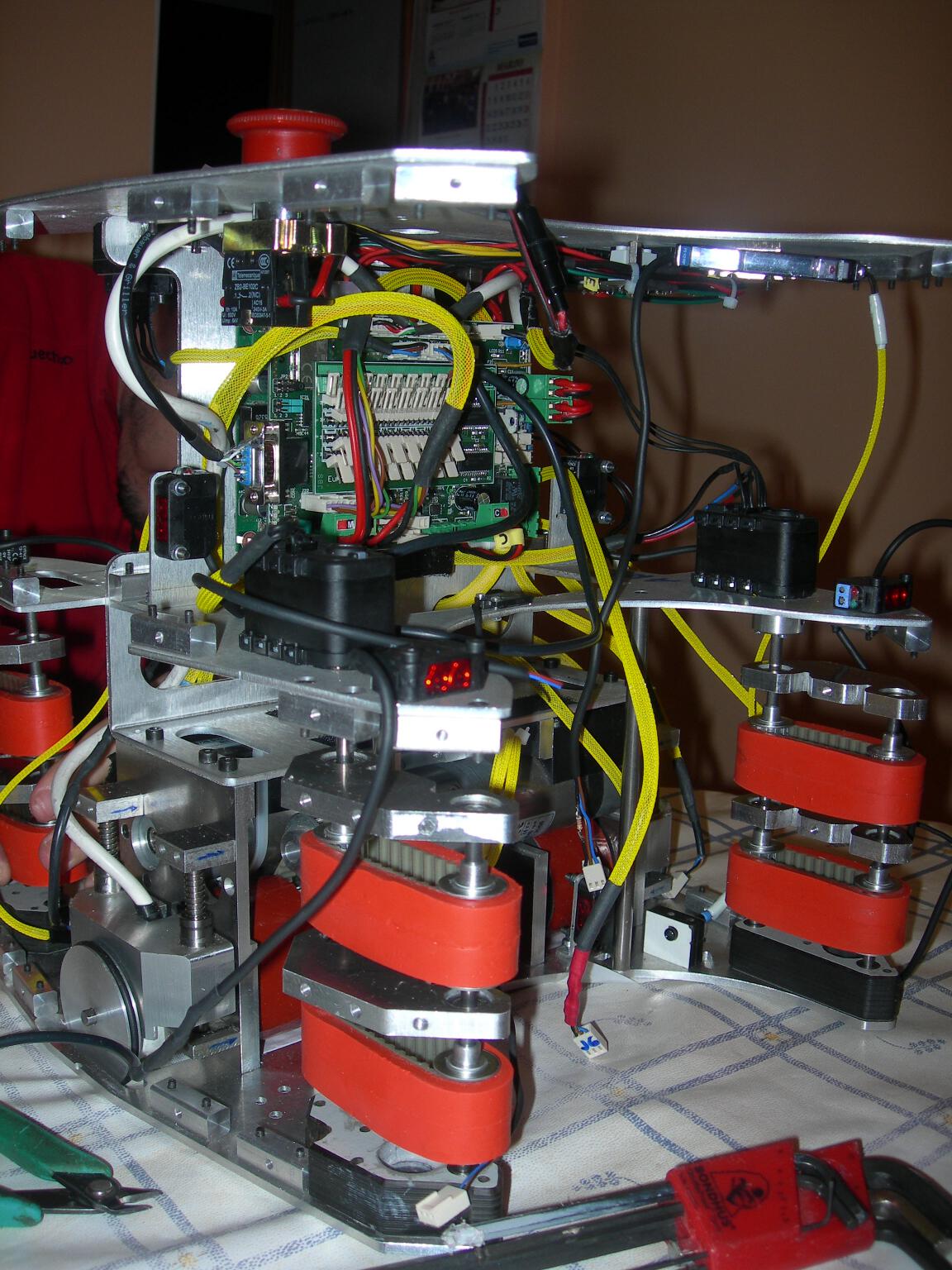
Zamorano fue el robot con el que competimos, fue el resultado de nuestra evolución tecnológica del 2010. Tenía una mecánica muy simple pero era un robot muy rápido e inteligente. Zamorano no era capaz de hacer torres de fichas, pero su inteligencia le permitía detectar si el oponente había hecho alguna torre y moverla a una casilla de su color.
Este año nos clasificamos primeros para las finales de Eurobot en Astrakhan (Rusia) donde llegamos hasta cuartos de final, ganando el partido de cuartos pero no pasando a la siguiente fase por una decisión arbitral injusta.








Click Play to watch the list of videos of our 2011 robots, including the finals in Astrakhan (Russia)
2010
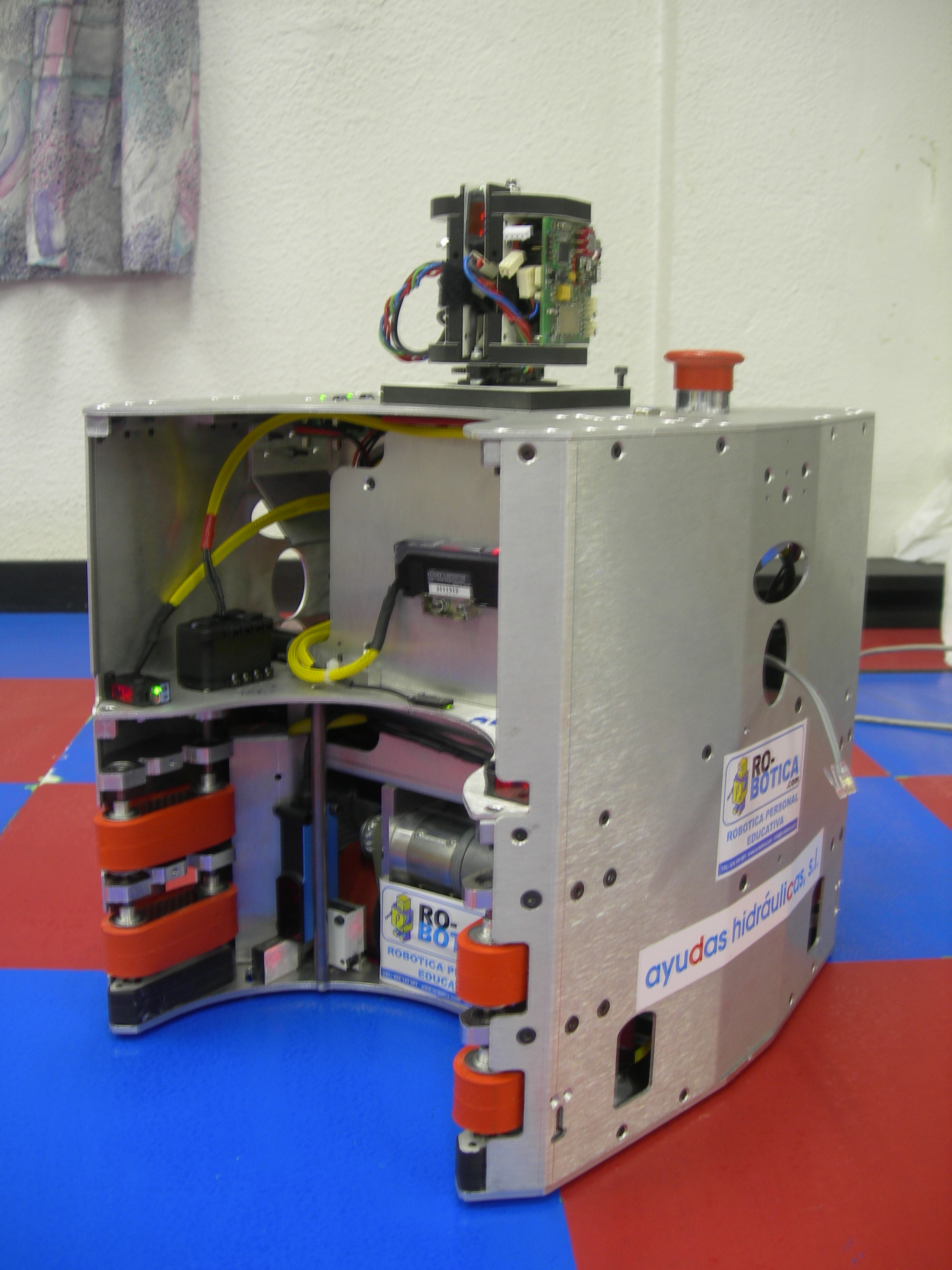
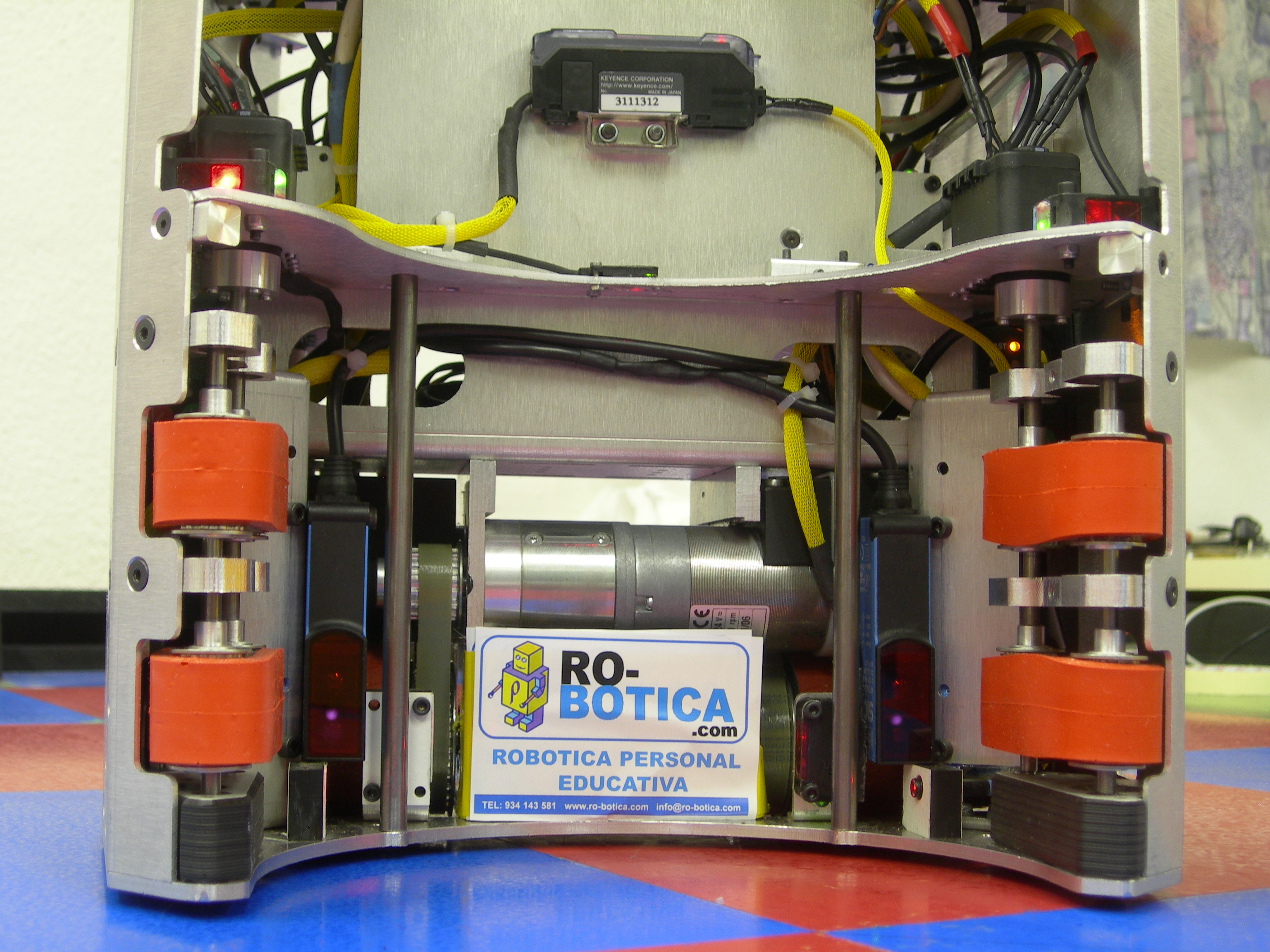
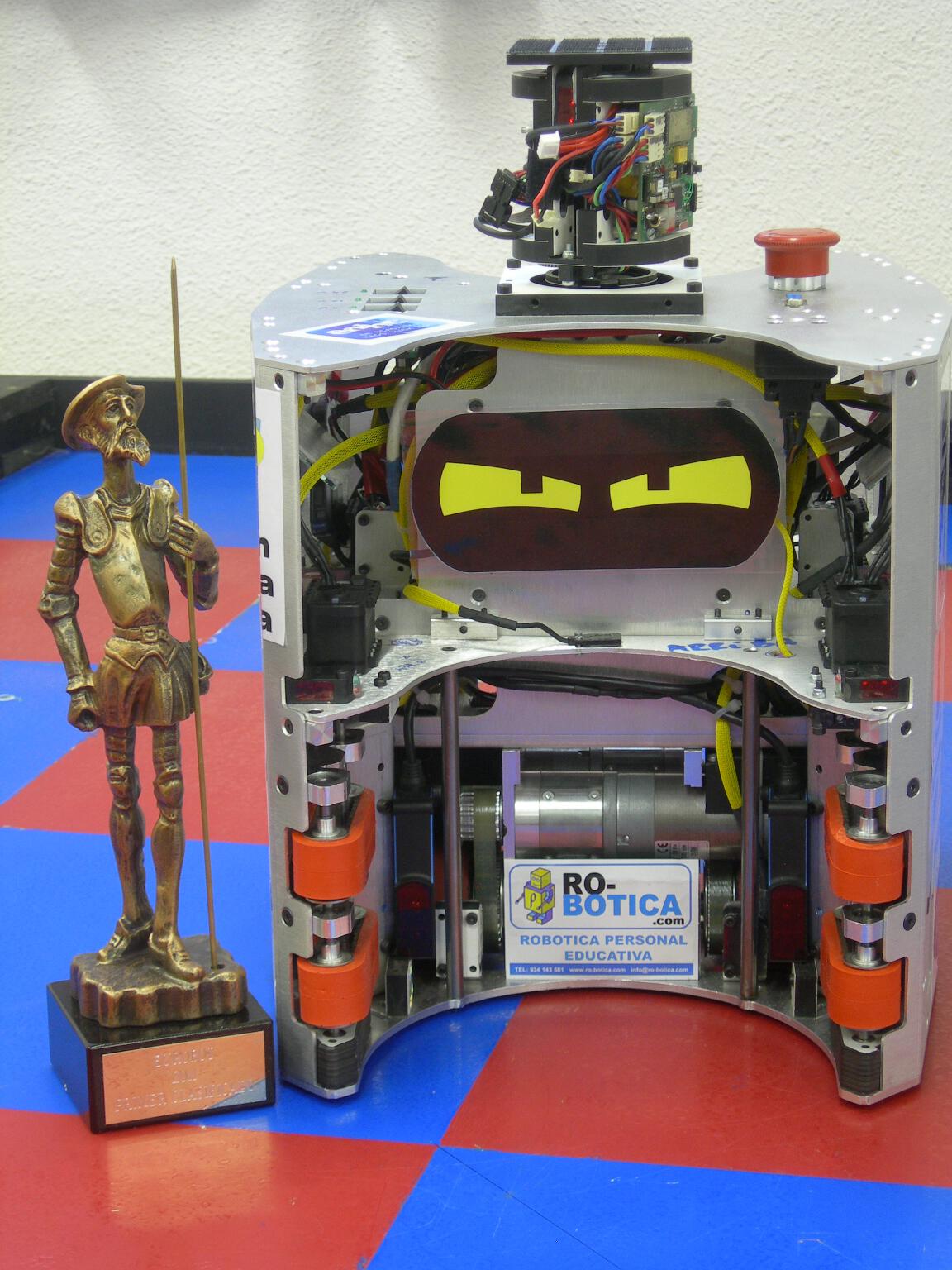
Eurobot 2010 – Robot Trompetero
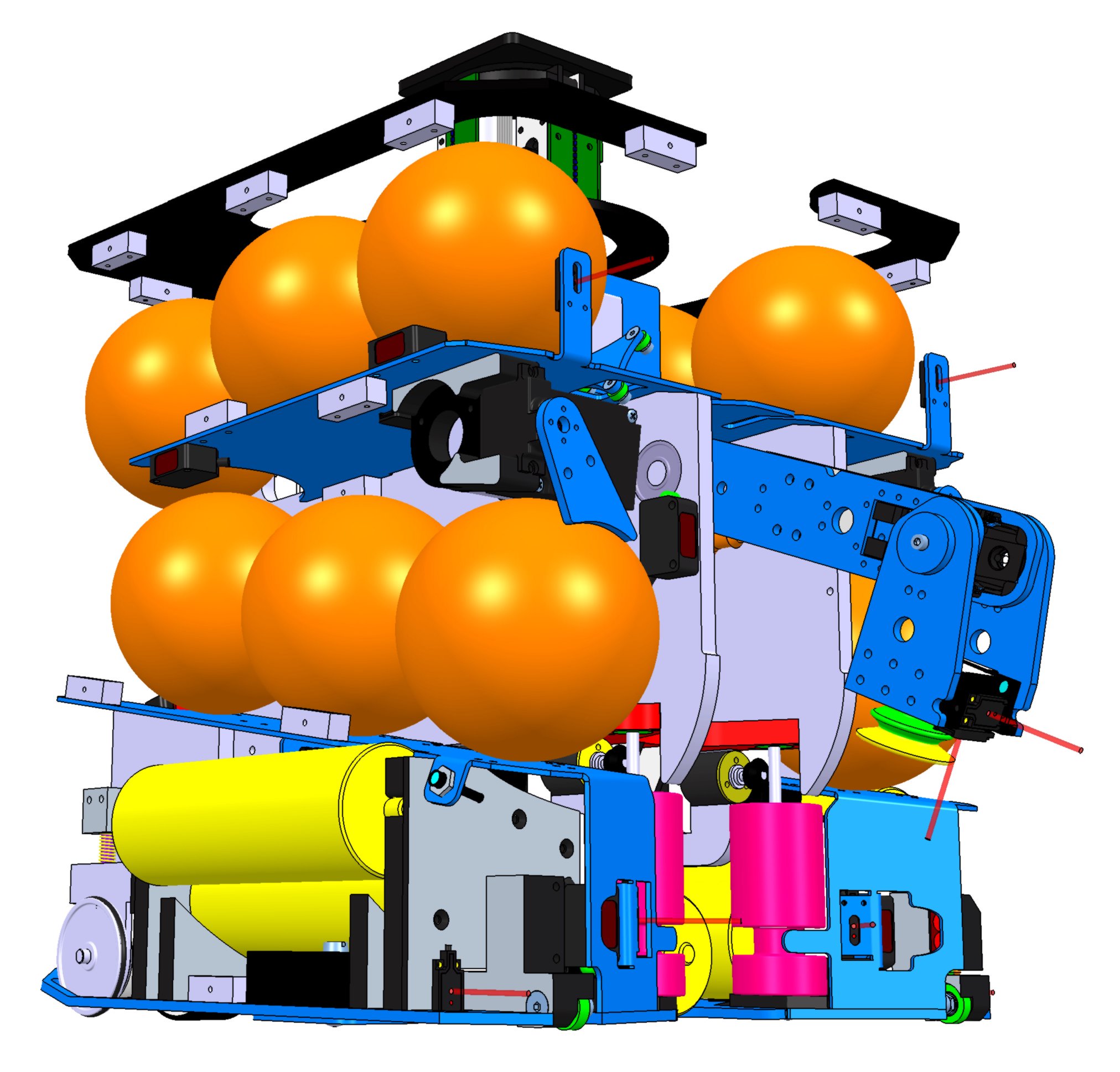
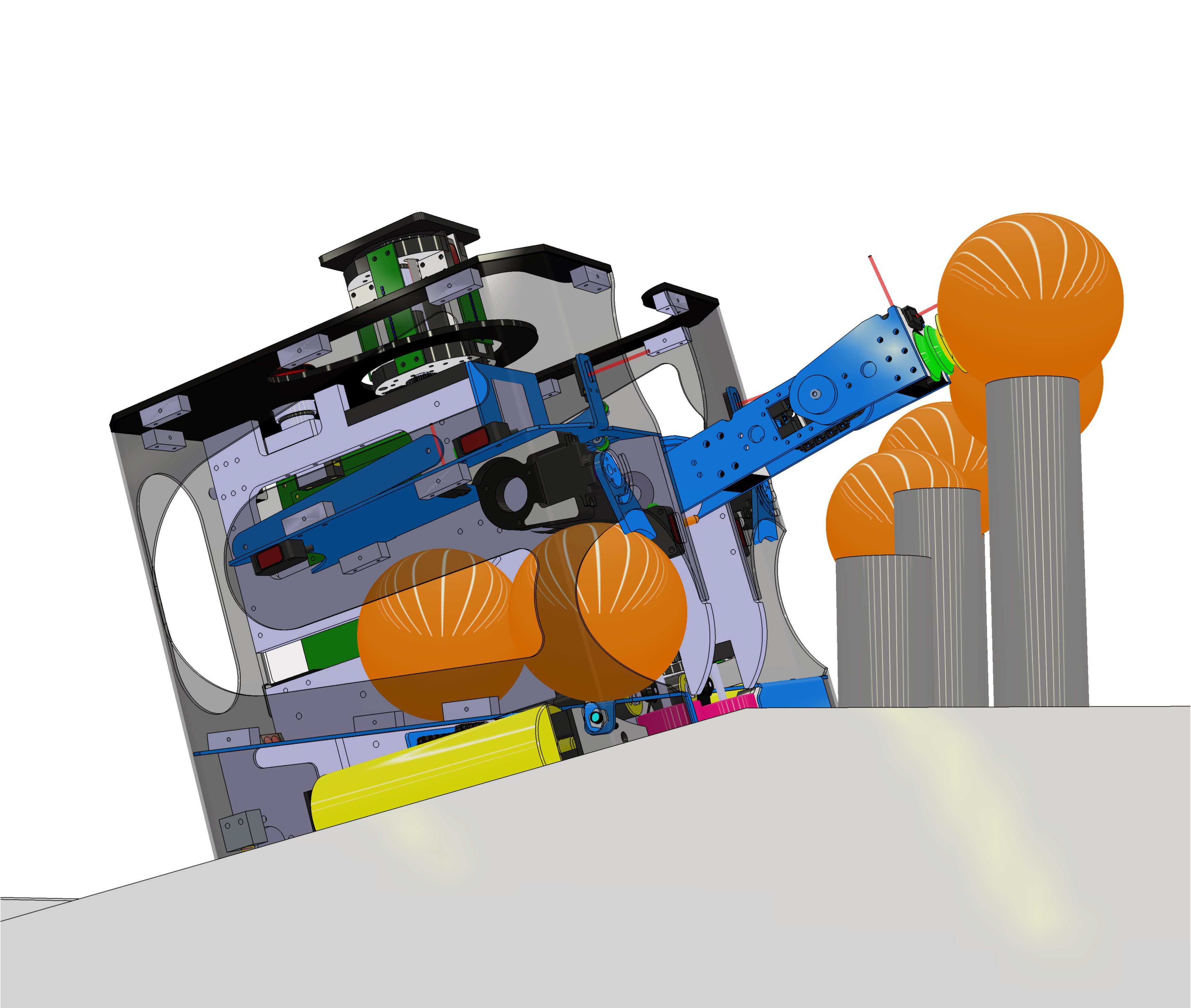
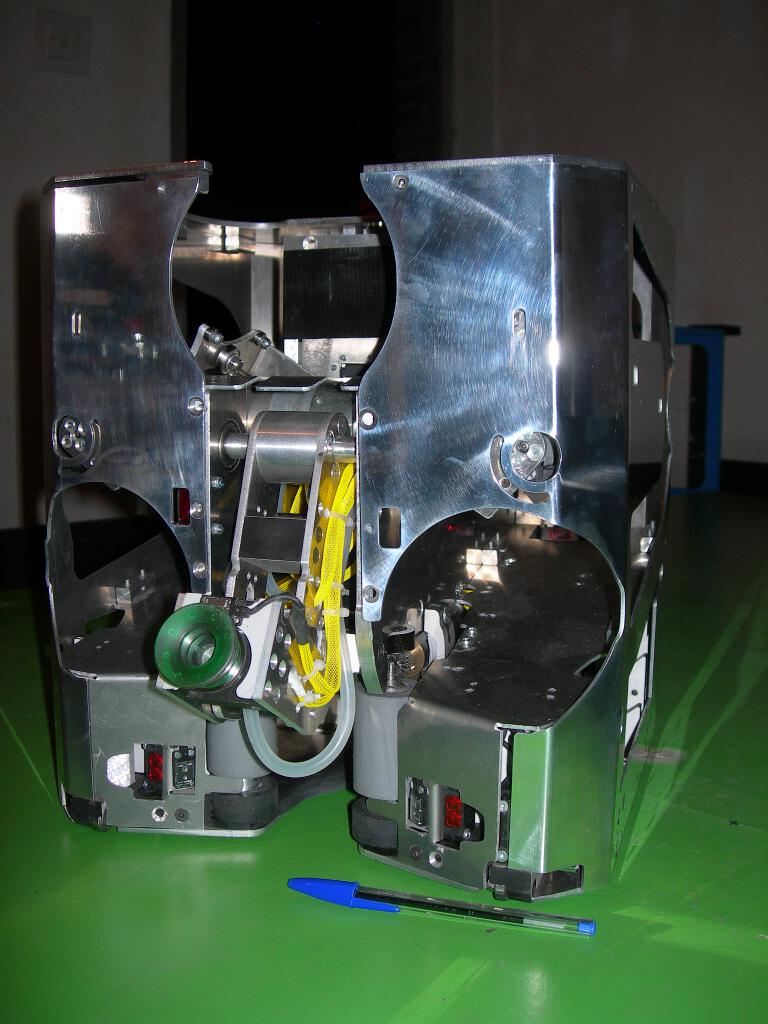
En el año 2010 los robots tuvieron que «alimentar al mundo» recolectando mazorcas, tomates y naranjas.
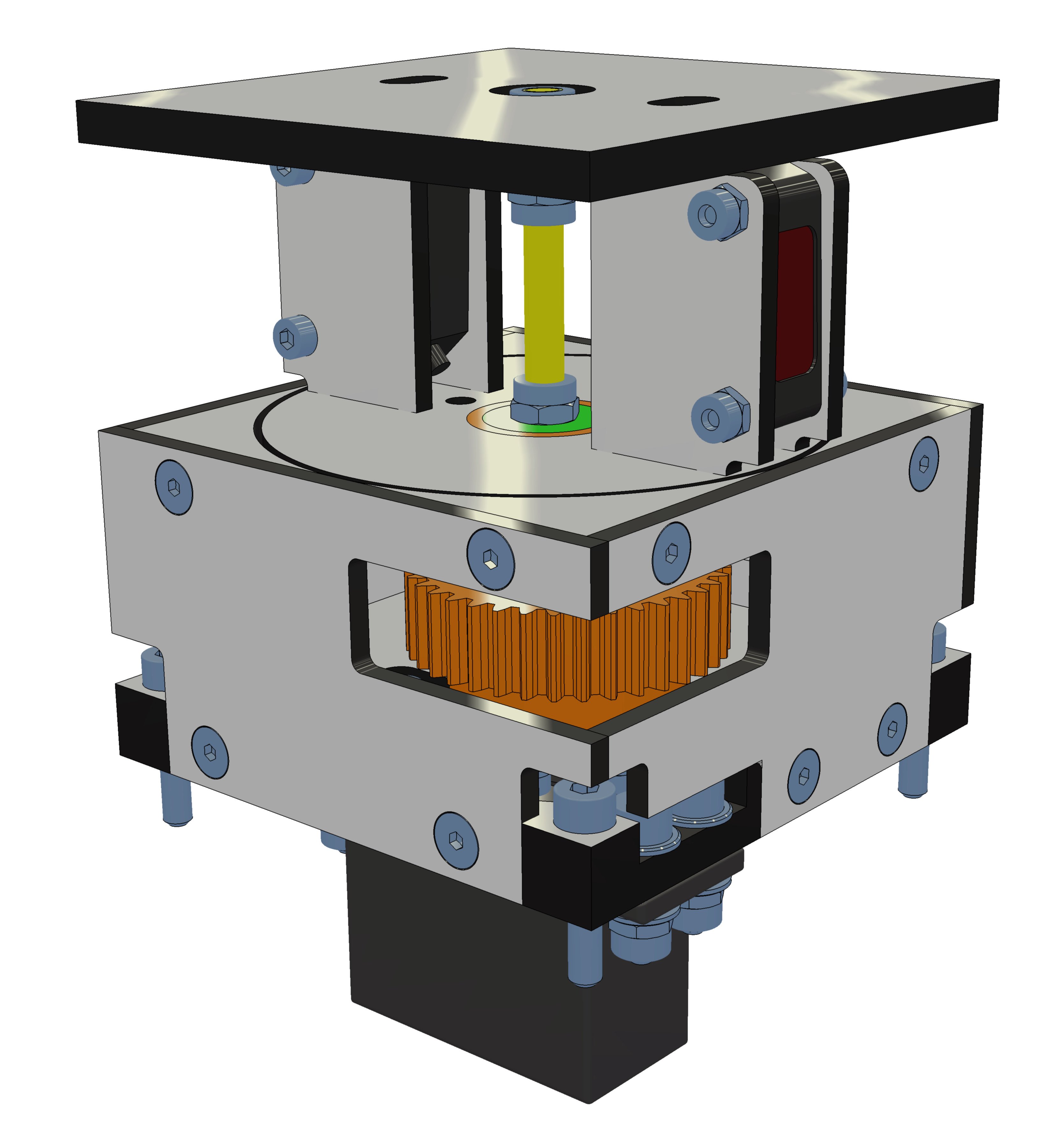
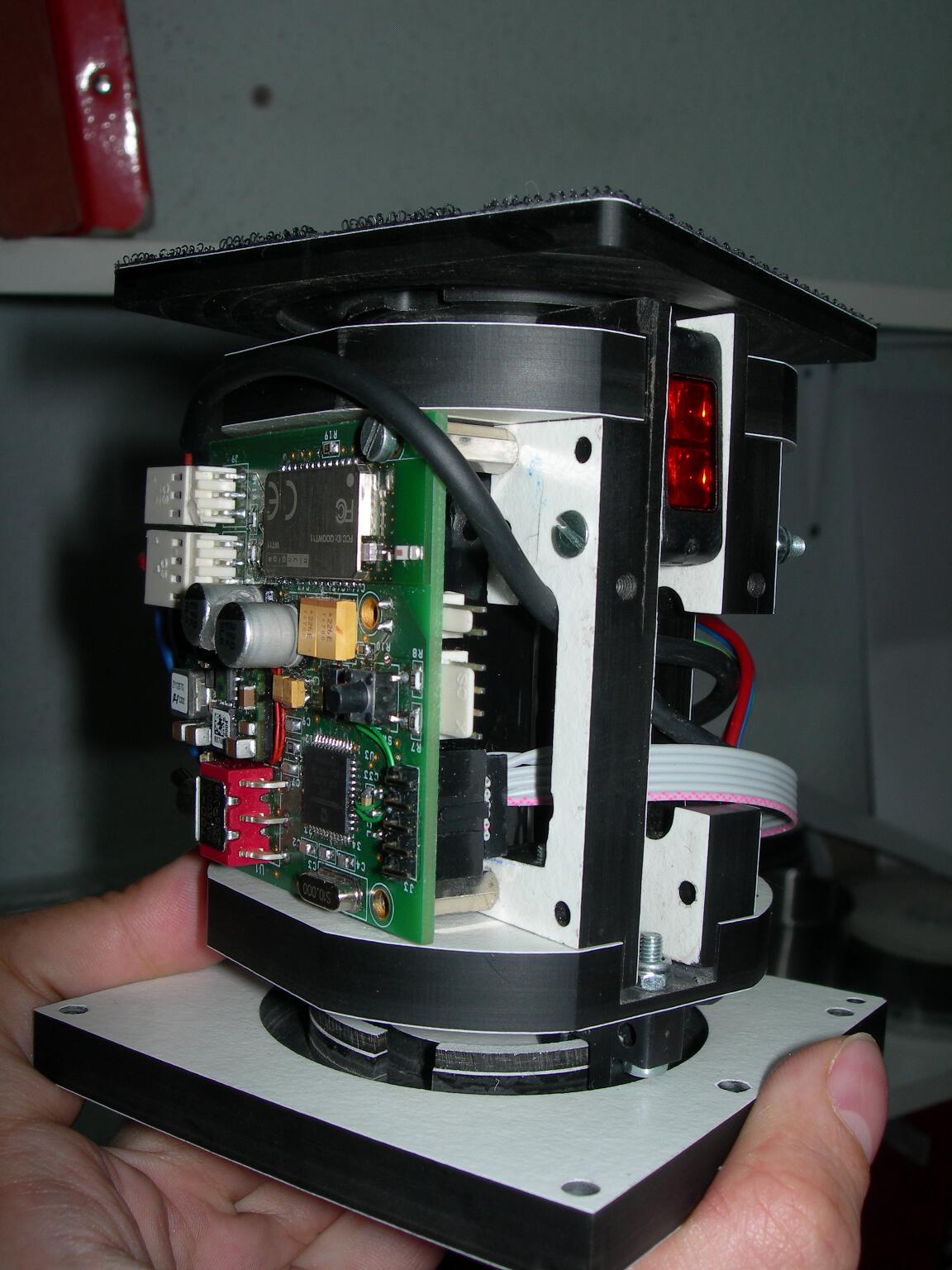
Este año construimos dos robots, Trompetero y MicroC. Construimos a Trompetero utilizando aluminio y Trespa, y empezamos a utilizar las librerías Aversive del equipo Microb lo que nos ayudó a evolucionar muchísimo tecnológicamente. Trompetero tenía un brazo con el que recolectaba naranjas y tomates, un sistema de posicionamiento con encoders al suelo y un sistema de detección del oponente que le permitía monitorizar su posición en todo momento.
Por otro lado, MicroC era un robot fabricado completamente en Trespa. Era un robot con un sistema muy original que le permitía moverse por el campo recolectando, sin preocuparse por las mazorcas negras, que estaban ancladas al suelo.
Ambos robots se clasificaron para las finales de Eurobot en Rapperswil-Jona (Suiza), terminando Trompero en la posición 32 y MicroC en la posición 19.







Click Play to watch the list of videos of our 2010 robots, including the finals in Rapperswil-Jona (Switzerland)
2008
Eurobot 2008 – Robot Topolino
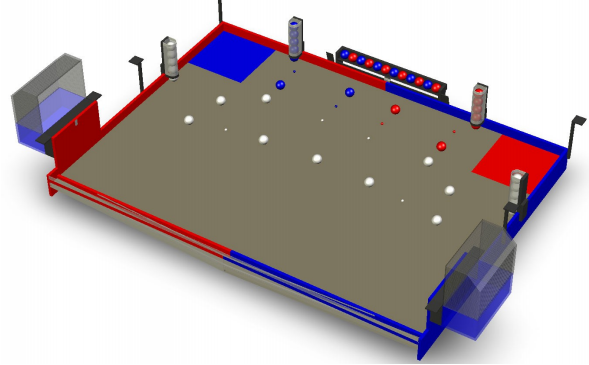
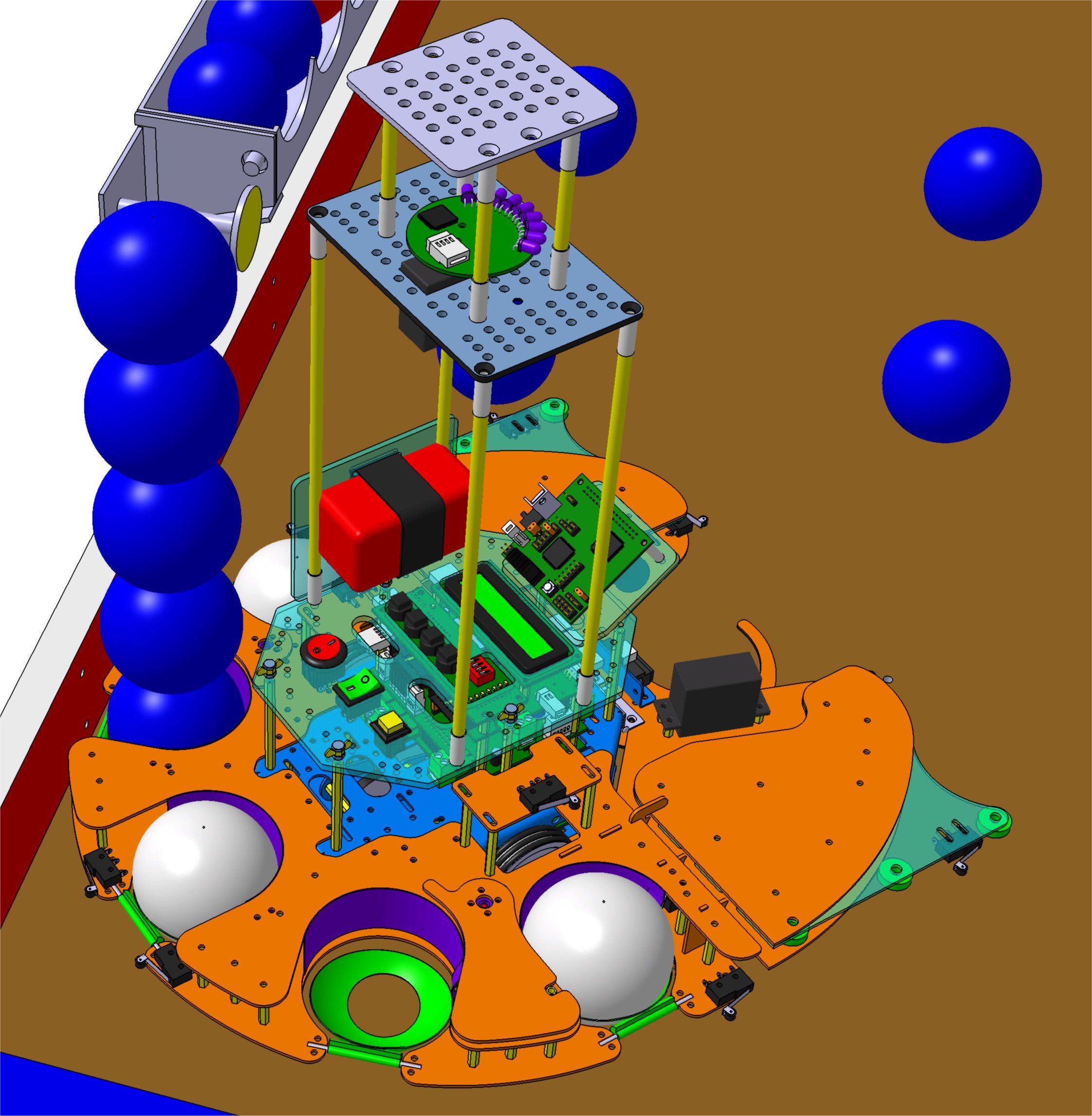
En el año 2008 los robots viajaron al planeta Marte, tenían que recolectar muestras de su color (rojas o azules). Si además intercalaban una muestra blanca entre dos rojas o azules obtenían mayor puntuación.
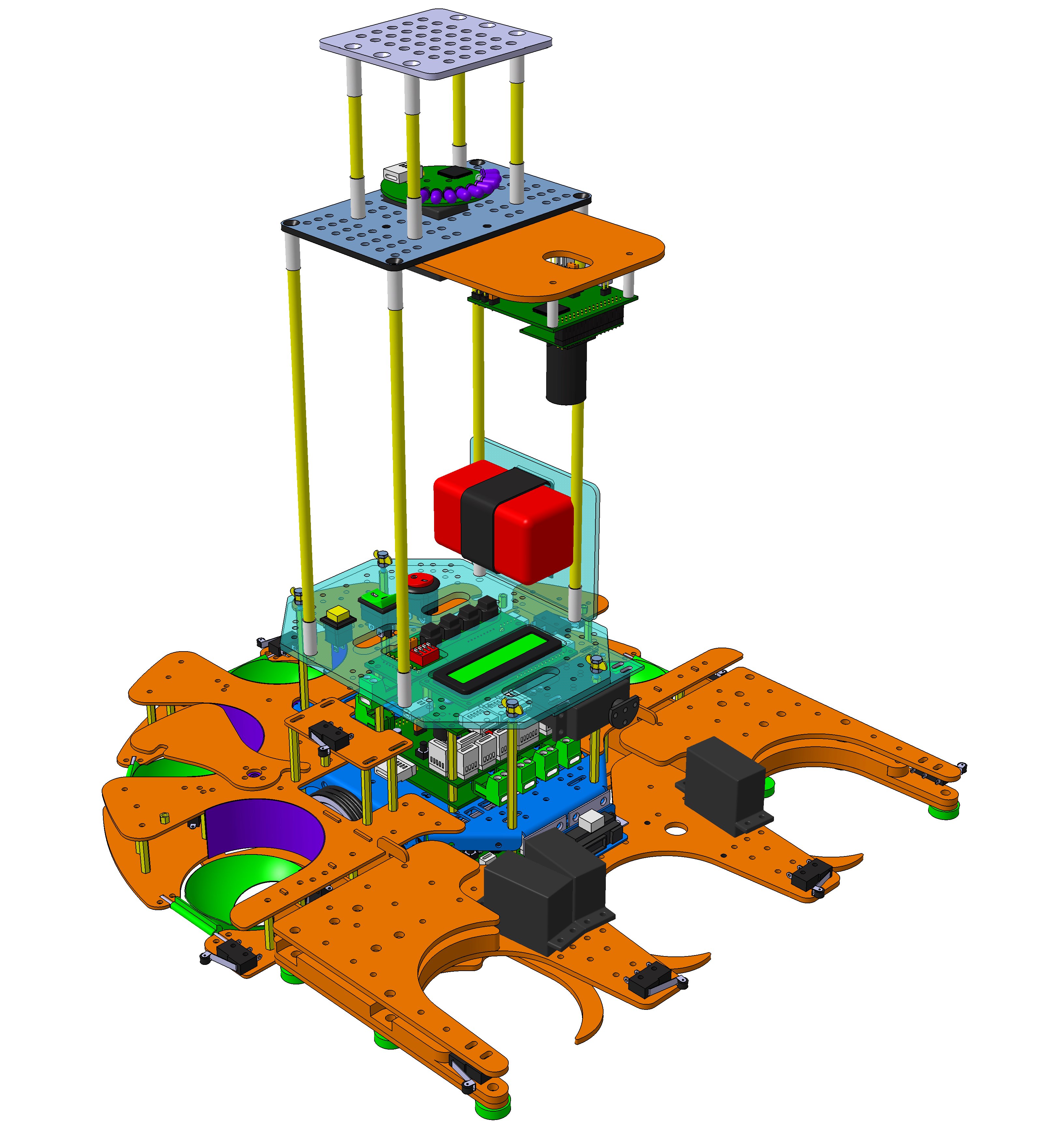
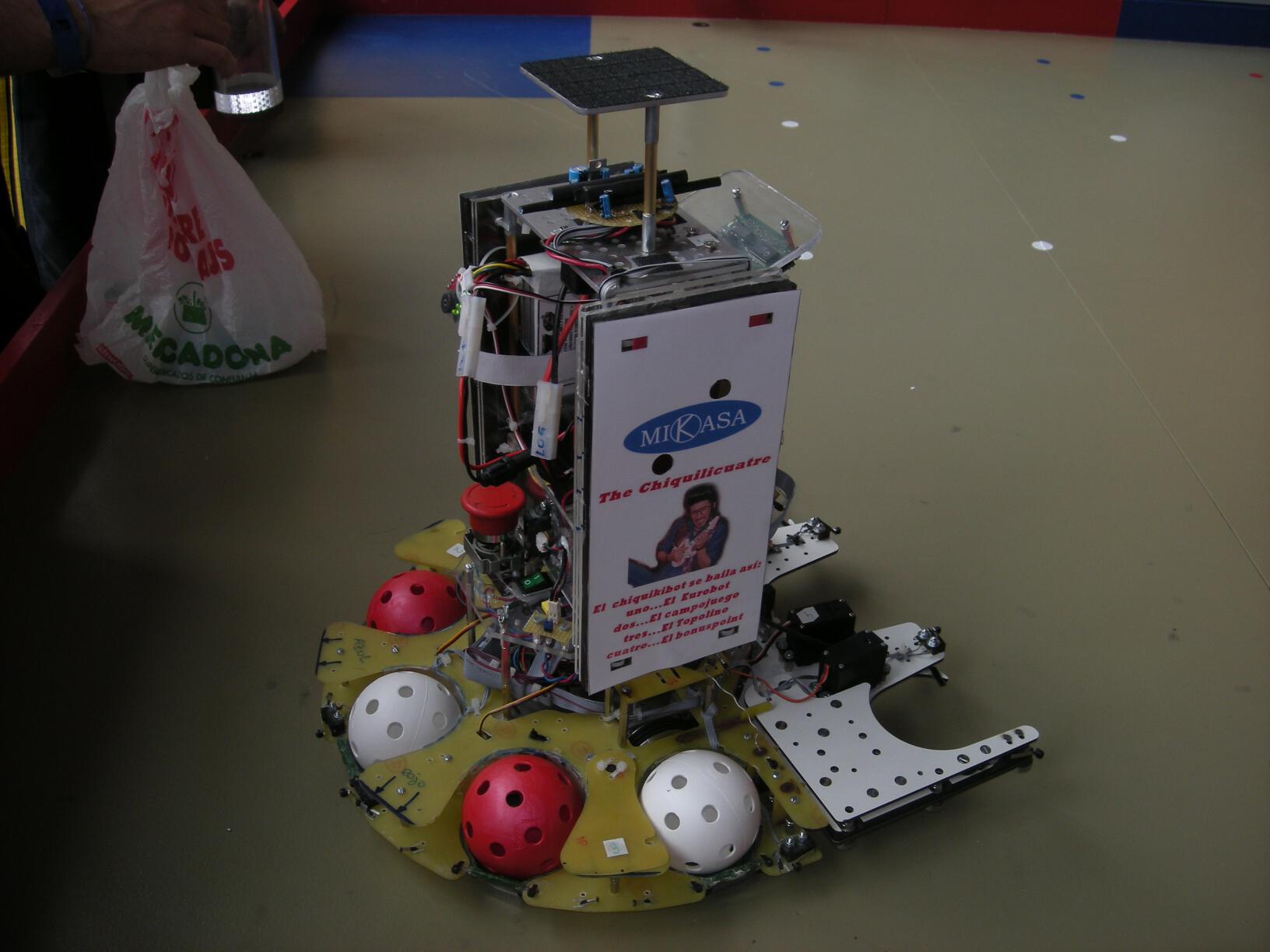
Nuestro robot, Topolino, era capaz de recolectar muestras y ordenarlas para obtener la mayor puntuación. Estaba fabricado en aluminio, fibra de vidrio y Trespa.
Topolino se clasificó para la finales de Eurobot en Heidelberg (Alemania) donde consiguió llegar hasta octavos de final. Además, Topolino recibió el premio al «Mejor concepto de robot» (Best Concep Prize) gracias a su original y peculiar sistema para recolectar y clasificar las muestras de Marte.




Click Play to watch the list of videos of our 2008 robots, including the finals in Heidelberg (Germany)
2007
Eurobot 2007 – Robot Mr. Proper
2007 fue el año en que los robots jugaron a recolectar y clasificar residuos que se encontrabas esparcidas por el campo: botellas de plástico, latas y pilas. Cada elemento a recolectar tenía una puntuación y debía ser almacenado en el container correspondiente.
Este año participamos con el robot Mr Proper. Mr Proper era capaz de recolectar y clasificar todos los elementos. Para ello utilizaba el sistema de posicionamiento que
desarrollamos en el 2004 y una red de microcontroladores dsPIC.
Defafortunadamente Mr Proper no pudo clasificarse para las finales de Eurobot de este año debido a problemas técnicos en la Copa de España de Eurobot.





Click Play to watch the list of videos of our 2007 robots, including the finals in La Ferté-Bernard (France)
2005
Eurobot 2005 – Robot Campanolo
El años 2005 los robots tuvieron que jugar a los bolos. Al igual que el año anterior se permitían hasta dos robots por equipo. Cada equipo partía de un lado del campo con todos sus bolos en pie. Los robots tenían que pasar al otro lado del campo a tirar los bolos del contrincante a través de un puente situado en posiciones aleatorias. Además los robots podían disparar pelotas de squash para poder derribar los bolos a distancia. Los robots que al final del partido tuviesen más bolos en pie ganaban.
Nuestro robot, Campanolo, estaba fabricado en Trespa y era capaz de arrasar con todos los bolos del oponente. Campanolo tenía 4 tirachinas gigantes para disparar 4 pelotas de squash y con los que podía derribar las torres de bolos del oponente desde el otro lado del campo. Además Campanolo tenía unos brazos que le permitían, una vez en el otro lado del campo, derribar aquellos bolos que aun quedaban en pie de una sóla pasada. La inteligencia de Campanolo así como sus sistemas mecánicos estaban programados y controlados por dos microcontroladores 8051.
Campanolo tenía un sistema de navegación muy peculiar, siempre se movia en linea recta y paralelo a las paredes del campo, no podía girar sobre si mismo. El sistema consistía en dos cajas una dentro de la otra. Cada caja tenía 4 ruedas, pero cada caja tenia las ruedas orientadas en una dirección del campo (4 ruedas hacia la parte larga del campo y las otras cuatro hacia a parte ancha). Cuando el robot quería avanzar a lo largo del campo, Campanolo sacaba una de las cajas, cuyas ruedas hacían contacto con el suelo, mientras la otra caja se ocultaba. Para avanzar a lo ancho del campo hacia lo contrario.
Campanolo consiguió clasificarse para las finales de Eurobot en Yverdon les Bains (Suiza) donde terminó 19 en el ranking. Además graciás a este sistema tan peculiar y original de moverse por el campo Campanolo fue nominado para el premio de «Mejor concepto de robot» (Best Concept Price).
Actualmente Campanolo se encuentra expuesto en el museo de la robótica de la tienda Juguetrónica en Madrid.







Click Play to watch the list of videos of our 2005 robots, including the finals in Yverdon-les-Bains (Switzerland)
2004
Euobot 2004 – Robots Electrococo y Joselito
En el 2004 los robots tenían que jugar al «Rougby del coco». Se permitían hasta dos robots por equipo. El equipo que más pelotas (cocos) tuviera en las porterias y en la canasta ganaba.
Construimos dos robots, Electrococo y Joselito (más pequeño). Electrococo esta fabricado en Trespa y utilizaba la misma tecnología que Husillo (2003). Era capaz de buscar las pelotas mediante visión artificial, recolectarlas y dejarlas en la porteria o dispararlas y encestarlas en la canasta. Para poder disparar desde cualquier punto del campo, desarrollamos un sistema de posicionamiento basado en una corona de sensores infrarrojas que permitía al robot conocer su posición en el campo. Conociendo su posición Electrococo podía calcular la distancia a la canasta y determinar la potencia de disparo para encestar en ella.
Joselito fue construido a partir de una cubeta de plastico. Era el portero, se encargaba de sacar los balones que el oponente metia en nuestra portería. Era capaz de detectar las pelotas por visión artificial y sacarlas de la portería. Para ello utilizaba una camara CMUCAM y un microcontrolador 8051.
Electrococo y Joselito consiguieron la clasificaron para las finales de Eurobot en La Ferté-Bernard (Francia).







Click Play to watch the list of videos of our 2004 robots, including the finals in La Ferté-Bernard (France)
2003
Eurobot 2003 – Robot Husillo
En el 2003 los robots tenían que jugar a «Cara o Cruz». El robot que voltease más fichas de su color ganaba el partido. Si además hacian una torre de tres fichas se obtenían más puntos.
Nuestro robot, Husillo, era un robot fabricado en Trespa y tenía un sistema para apilar y voltear al mismo tiempo las fichas. Mediante un sistema de visión artificial Husillo era capaz de buscar las fichas y distinguir su color. Un PC empotrado con GNU/Linux implementaba la inteligencia y el reconocimiento de visión artificial usando las librerías Open CV. El movimiento del robot y otros sistemas mecánicos estaba controlados mediante una red de microcontroladores 8051.
Husillo consiguió la clasificaron para las finales de Eurobot en La Ferté-Bernard (Francia).










Click Play to watch the list of videos of our 2003 robots, including the finals in La Ferté-Bernard (France)